Die auf zwei Kugellagern rollende, zierliche Konstruktion variiert die Geschwindigkeit ihres rechten Rades je nachdem, ob der Fotowiderstand am Bug einen dunklen oder hellen Untergrund meldet. So kann der skurrile Mini-Roboter Kanten und Linien verfolgen.
Zutaten

- 2 Motoren aus CD-Laufwerken
- 1 Stück Schlauch zur Achsenverdickung (10mm lang)
- 2 Mignon-Zellen plus Halter für die zwei Zellen
- 1 Transistor BD137
- 1 Fotowiderstand M9960-11b
- 2 Kugellager „608”
- 1 Luftballon
- 1 Eisstäbchen
- 1 Stück Riffelstab, 8cm lang, Durchmesser 8mm
- Etwas Leim
- Etwas Schaltdraht
Beschreibung

Ein Eis-am-Stiel-Hölzchen dient als Chassis, ein Riffelstab (auch bekannt unter der Bezeichnung „langer Holzdübel”) als Achse. Der Antrieb erfolgt über zwei Motoren, die ausgedienten CD-Laufwerken entstammen. Die Elektronik des kleinen Kantenverfolgers ist denkbar simpel: Über einen Transistor beeinflusst ein lichtempfindlicher Widerstand (LDR) die Geschwindigkeit des rechten Motors. Bekommt dieser volle Spannung, dreht das über einen Gummiriemen angetriebene rechte Rad sich schneller als das linke (das immer mit voller Spannung läuft), da die rechte Welle durch ein Stückchen Schlauch verdickt wurde. Das Gerät lenkt dann nach links. Lässt der Transistor hingegen nur wenig Spannung für den rechten Motor durch, lenkt das Ganze nach rechts.
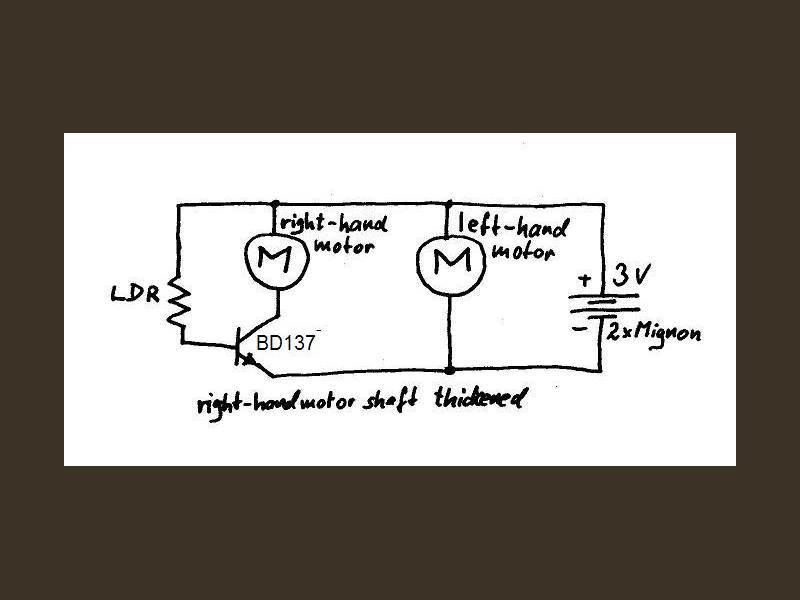
Auf diese Weise richtet die Lenkung des kleinen Kantenverfolgers sich nach der Helligkeit des Untergrunds, die der am Bug montierte, nach oben abgeschirmte LDR wahrnimmt.
Viel simpler lässt sich eine solche Aufgabe nicht lösen. Das flinke Roboterchen ist ganze 300 Gramm leicht; seine Maße von 12 cm × 8 cm × 5 cm (Breite × Höhe × Tiefe) machen es manteltaschentauglich. Die Idee zu dieser Konstruktion entstand im Umfeld des Roboterrennens „Spurt” an der Rostocker Universität.
(psz)
Video
(psz)