

Disney Research: So bringt jeder einen Roboter zum Krabbeln
Disney Research hat ein Herz für Amateur-Robotiker: Eine experimentelle Software erzeugt Laufmuster mit Geling-Garantie und liefert gleich noch die 3D-Druckvorlagen für Roboter mit beliebig vielen Beinen mit.
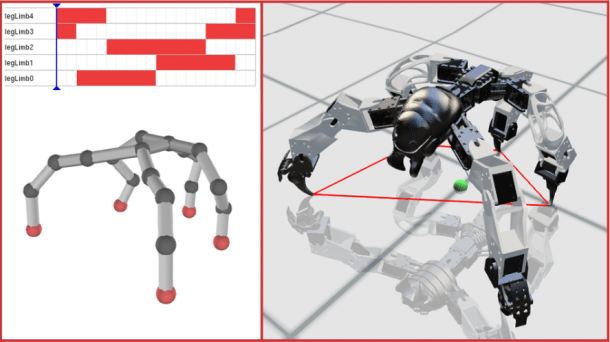
(Bild: Screenshot aus dem verlinkten Video)
Ein Forscherteam von Disney Research in Zürich und der Carnegie Mellon University hat eine Software entwickelt, mit deren Hilfe auch Laien Robotern das Laufen beibringen können sollen. In einer 3D-Simulation erzeugt man einfach durch Verschieben von Reglern mit der Maus Bewegungsmuster, die den zunächst mit vier Beinen ausgestatteten Simulanten vorwärts oder seitwärts laufen oder ihn in die Kurve gehen lassen. Anschließend kann man den Bewegungsmustern noch individuelle Abweichungen beimischen, um einzelne Roboter mit einer speziellen Gangart und damit "Charakter" auszustatten.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes YouTube-Video (Google Ireland Limited) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (Google Ireland Limited) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Hinter den Kulissen arbeitet ein Optimierungsalgorithmus, der automatisch stabile Bewegungsmuster erzeugt, die den Roboter in die gewünschte Richtung bringen. Dabei kann der Anwender auch die Geometrie der Maschine mit wenigen Mausklicks verändern und dabei beobachten, wie sich die Bewegungsmuster verändern, wenn er etwa die Beine länger zieht oder zusätzliche Gelenke in Gliedmaßen oder Rückgrat einpflanzt.
3D-druckreif
Steht das Design, soll die Software auf Knopfdruck 3D-Vorlagen für alle Teile exportieren, die sich auf einem 3D-Drucker fertigen lassen. Als Aktoren sind handelsübliche Servos vorgesehen. Soll der Roboter nicht nur funktionieren, sondern auch nach mehr aussehen, kann der Nutzer vor dem Export bereits vorhandene 3D-Modelle etwa für einen Kopf oder für Schulterkacheln in die Software laden, an der richtigen Stelle platzieren und mit den funktionalen Teilen des Roboterchassis verschmelzen. Wie die Forscher schreiben, haben sie die Funktion ihrer Software überprüft, indem sie damit sechs Laufmaschinen mit unterschiedlichen Eigenschaften entwickelt haben: mit zwei, vier oder fünf Beinen, großflächigen oder spitzen Füßen (nach Spinnenart), starrem oder gegliedertem Rückgrat und unterschiedlichen Proportionen.
Die Forscher haben ihre Arbeit bei der Konferenz ACM Siggraph Asia 2015 vorgestellt, die vom 2. bis 5. November im japanischen Kobe stattfand. Selbst ausprobieren kann man die Software leider noch nicht.
- Paper als PDF: Vittorio Megaro, Bernhard Thomaszewski, Maurizio Nitti, Otmar Hilliges, Markus Gross, Stelian Coros, Interactive Design of 3D-Printable Robotic Creatures
(pek)
