

MIT: Robotergreifer schnappt reflexartig zu – und greift sicherer
Ingenieure des MIT haben einem Greifer das reflexartige Zugreifen beigebracht. Damit sollen später Roboter möglich sein, die im Haushalt aufräumen können.
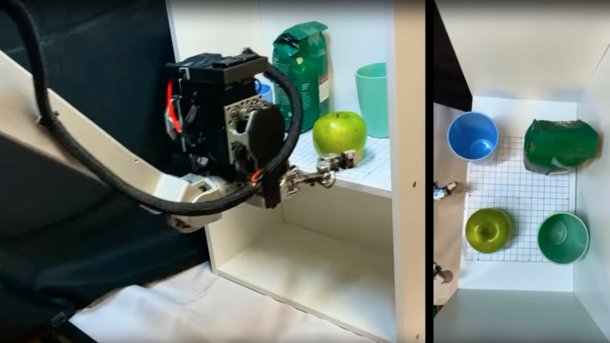
(Bild: MIT (Screenshot))
Ingenieure des Massachusetts Institute of Technology (MIT) haben einen Greifer für Roboter entwickelt, der schneller und menschenähnlicher Objekte aufnehmen kann. Er greift mit vorgefertigten Reflexen zu.
Herkömmliche Robotergreifer arbeiten verhältnismäßig langsam. Über Kameras etwa werden bekannte Objekte erfasst und daraus ein Plan entwickelt, wie ein Objekt gegriffen werden kann. Der Greifer wird dann entsprechend angesteuert. Schlägt der Greifversuch jedoch fehl, müssen für einen weiteren Versuch erneut Berechnungen angestellt werden – mit hohem Zeitverlust. Solche Greifer eignen sich kaum für unstrukturierte Umgebungen. Denn es kann immer mal wieder vorkommen, dass ein unbekanntes Objekt gegriffen werden soll. Dann weiß der Greifer damit nichts anzufangen.
Die Forschenden des MIT haben nun einen Robotergreifer entwickelt, der sich im Moment des Greifens reflexartig anpasst, um einen besseren Halt des Objektes zu erreichen. Der Greifer ist in der Lage, sich selbst auf den "letzten Zentimetern" anzupassen, wie es in einer Mitteilung des MIT heißt. Das genaue Design des Robotergreifers wird im Mai auf der International Conference on Robotics and Automation (ICRA) vorgestellt.
Videos by heise
Der Robotergreifer besteht aus einem Hochgeschwindigkeitsarm und zwei leichten Fingern, die über mehrere Gelenke verfügen. Zum Einsatz kommen dabei reaktionsschnelle Aktuatoren, die das Team für den Mini Cheetah, einem flinken vierbeinigen Roboter, entwickelt hatte. An den Fingerspitzen sind Sensoren angebracht, die mehr als 200-mal pro Sekunde die Kraft messen und den Ort einer Berührung sowie die Nähe des Fingers zu Objekten erfassen können.
An der Basis des Robotergreifers befindet sich eine Kamera. Mit ihr werden visuelle Daten zu einem Objekt aufgenommen und die Position ermittelt, an der der Greifer das Objekt anfassen soll. Zusätzlich wird die Position bestimmt, wo der Robotergreifer das Objekt wieder absetzen soll. Ein Planer legt dann den Pfad fest, auf dem der Roboter das Objekt greift und abstellt.
"Reflexe" auf Abruf
Künftig übernimmt ein reflex-artiger Steuerungsmechanismus das Ruder. Gelingt es dem Greifer nicht, das Objekt richtig zu fassen, zieht er sich nicht zurück und beginnt von vorn. Er wendet stattdessen als Reaktion auf die Echtzeitmessungen der Sensoren in den Fingerspitzen einen von drei programmierten Greifmanövern an, die die Wissenschaftler als "Reflexe" bezeichnen. Sie setzen innerhalb des letzten Zentimeters vor dem Objekt ein und steuern den passenden Griff. Ein höherwertiger Planer wird dazu nicht benötigt, die Entscheidung, welches Griffmanöver durchgeführt wird, liegt auf einer niedrigeren Entscheidungsebene und spart dadurch Zeit.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes YouTube-Video (Google Ireland Limited) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (Google Ireland Limited) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Getestet haben die Forscher die Reflexe des Greifers beim Aufräumen eines überfüllten Regals. Der Roboter musste dabei verschiedene Haushaltsgegenstände wie etwa einen Schlüssel, eine Tasse, eine Dose, einen Apfel sowie einen Beutel mit Kaffeesatz greifen. Dazu passte er den Greifer an die jeweilige Form an und griff mit der nötigen Kraft zu. Der Greifer konnte in 90 Prozent von 117 Fällen ein Objekt erfolgreich aufnehmen und absetzen.
Die Wissenschaftler änderten in einem weiteren Experiment die Position eines Bechers während des Greifvorgangs. Obwohl der Roboter keine neuen visuellen Daten verarbeitete, gelang es ihm, den Greifer korrekt auszurichten und den Becher aufzunehmen.
Die MIT-Ingenieure wollen nun weitere Reflexe programmieren. Die sollen noch deutlich komplexer ausfallen. Damit wollen sie einen Roboter entwickeln, der "Pick and Place"-Aufgaben erfüllen und in unstrukturierten Umgebungen arbeiten kann. Die Wissenschaftler sind der Ansicht, so einen Roboter entwickeln zu können, der möglicherweise im Haushalt aufräumen kann.



(olb)