
Neuer Roboter-Finger kann feine Texturen ertasten – und unterscheiden
Ein neuer kombinierter Sensor kann sowohl Druck als auch hochfrequente Schwingungen von Materialien wahrnehmen und diese zuverlässig identifizieren.
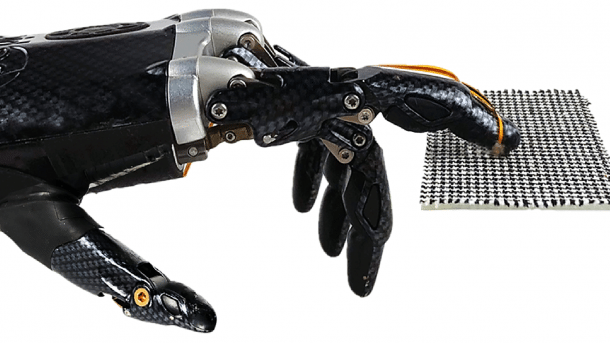
Trainiert wurden das Sensorsystem anhand von 20 Textilien verschiedener Struktur.
(Bild: Nature Communications / Chuan Fei Guo et al.)
- Eike Kühl
Dank der Tastsensoren in unseren Fingerspitzen sind wir Menschen in der Lage, Objekte nicht nur blind zu ertasten, sondern können sie auch ihren Eigenschaften entsprechend behandeln: Ein rohes Ei fassen wir automatisch behutsamer an als einen Ball, der gleich groß und schwer ist. Möglich machen das verschiedene Rezeptoren in den Fingerspitzen, die sowohl statischen Druck als auch hochfrequente Schwingungen von Materialien wahrnehmen können. Für Roboter ist diese Unterscheidung ungleich schwerer; sie benötigen dafür auf eine Vielzahl verschiedener Sensordaten, die ausgewertet und analysiert werden müssen. Das ist langsam und nicht immer genau.
Videos by heise
Eine Forschungsgruppe aus China hat nun im Fachmagazin "Nature Communications" eine künstliche Fingerspitze vorgestellt, die an das menschliche Tastorgan angelehnt ist. "Künstliche Sensoren sind oft nicht oder nur unzureichend in der Lage, die reale Welt durch Berührung zu erkennen", schreiben die Forschenden. Das von ihnen entwickelte "künstliche sensorische System" verwendet nur einen einzelnen, kombinierten Sensor, um sowohl Druck als auch Schwingungen während des Ertastens zu messen, was zu einer höheren Genauigkeit bei der Unterscheidung von feinen Texturen führt.
Bei dem Slip-Sensor genannten System handelt es sich um künstliche Fingerspitzen mit verschiedenen Lagen. Die äußerste Lage ist der künstliche Fingerabdruck, der aus dem Polymer Polydimethylsiloxan (PDMS) besteht und über mikroskopisch kleine Rillen verfügt, ähnlich wie ein menschlicher Finger. Dahinter stecken zwei Elektroden, die durch eine mikrostrukturierte Gelschicht voneinander getrennt sind. "Sowohl die Abmessungen als auch die Elastizität liegen nahe an dem der menschlichen Fingerabdrücke, um Vibrationsreize bei der Berührung effektiv zu erfassen", heißt es in der Studie.

(Bild: Nature Communications / Chuan Fei Guo et al.)
Neuer Sensor kann Textilien zuverlässig erkennen
Der Aufbau des Sensors ermöglicht den Wissenschaftlern zufolge sowohl eine höhere Sensitivität als auch kürzere Relaxationszeit, was entscheidend ist bei der Erkennung hochfrequenter Schwingungen: Je schneller sich das System nach der Aktivierung wieder entspannt, desto genauer kann es Schwingungen messen. Bestehende Sensoren kämen derzeit auf eine Relaxationszeit von "einigen zehn Millisekunden", der Slip-Sensor dagegen auf eine Zeit zwischen 0,6 und 1,8 Millisekunden.
Um das System zu testen, haben die Forschenden einen Versuchsaufbau gewählt, in dem der an einer Handprothese heftende Sensor über verschiedene Textilien, wie Wolle oder Baumwolle, fährt. Um das künstliche sensorische System zu trainieren, hat es 20 Textilien unterschiedlicher Struktur ertastet, indem es unterschiedlich schnell über die Materialien fuhr. Mithilfe von Techniken des maschinellen Lernens entstand daraus ein Klassifizierungsmodell, mit dem die Forschenden herausfinden konnten, ob der Slip-Sensor die richtigen Textilien in den anschließenden Tests zuverlässig erkennt. Das war selbst bei variablen Tastgeschwindigkeiten in 98,6 Prozent der Fall.
"Ein solches künstliches Sinnesorgan ist nicht nur in der Robotik nützlich, sondern könnte auch im Gesundheitswesen und der Unterhaltungselektronik zum Einsatz kommen", heißt es in der Studie. Mögliche Anwendungen könnten neben der Industrie neuartige Prothesen sein oder auch der Einsatz in einer "haptikbasierten virtuellen Realität", in der sich die Art und Weise, wie man Objekte in der Realität ertastet, auch in Games oder in Metaverse-Anwendungen widerspiegelt.


(jle)