

Robocup-WM: Es geht nicht nur um Fußball
Bis zum Jahr 2050 sollen humanoide Roboter gegen den menschlichen Fußballweltmeister gewinnen. Doch viel wichtiger sind die dabei entwickelten Techniken für andere Anwendungen.
Bis zum Jahr 2050, so die Vision des RoboCup, sollen humanoide Roboter gegen den menschlichen Fußballweltmeister gewinnen. Abgesehen vom Vergnügen für die Zuschauer ist das völlig nutzlos. Die Technologien jedoch, die auf dem Weg zu diesem anspruchsvollen Ziel entwickelt werden müssen, werden eine Fülle auch kommerziell interessanter Anwendungen ermöglichen. Das jedenfalls ist die Idee der RoboCup-Initiative.
Diese Anwendungen entstehen indessen nicht von selbst. Roboterfußball beschäftigt sich zwar mit grundlegenden Fragen, die alle mobilen, autonomen Roboter betreffen, wie Navigation, Selbstlokalisierung oder Kooperation. Um die auf dem Fußballfeld gefundenen Lösungen auch in anderen Umgebungen nutzen zu können, ist aber zusätzliche Entwicklungsarbeit erforderlich. Die Fußballwettbewerbe beim RoboCup sind daher nach und nach um weitere Wettbewerbe ergänzt worden. Hier werden den Robotern Aufgaben gestellt, die näher an der kommerziellen Nutzung sind.
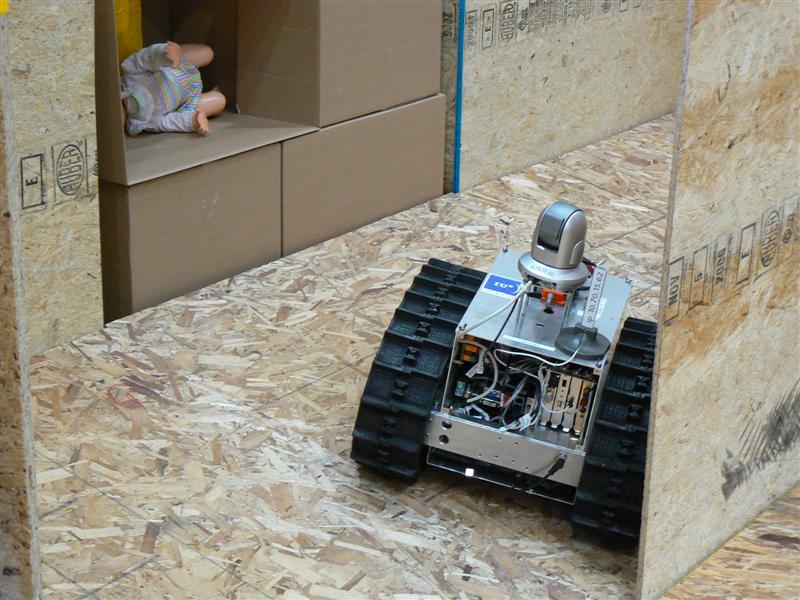
So gibt es seit 2001 die Rescue Robot League, bei der sich die Roboter in einer simulierten Katastrophenumgebung bewähren müssen. Anders als beim Fußball dürfen sie ferngelenkt werden. Die Teams haben 20 Minuten Zeit, ihre Roboter und Steuerkonsolen einsatzbereit zu machen und in der Rescue Arena nach menschlichen Opfern zu suchen, die durch Puppen dargestellt werden. Diese Puppen strahlen Wärme aus, bewegen sich oder rufen um Hilfe, können also auf unterschiedliche Weise erkannt werden. Die Arena selbst ist hinsichtlich der Zugänglichkeit in drei verschiedene Schwierigkeitsgrade unterteilt.
Es geht bei diesem Wettbewerb auch darum, standardisierte Testmethoden zu entwickeln, um die Leistungen der Roboter vergleichen und quantifizieren zu können. So sind etwa die möglichen Steigungen und Unebenheiten in den verschiedenen Bereichen der Arena genau definiert. Hiermit ist der RoboCup offenbar auf einem guten Weg. „Erfahrene Rettungskräfte sagen uns, dass dies genau die Fähigkeiten sind, die sie von Robotern erwarten“, sagt Adam Jacoff, der die Rescue League seit ihren Anfängen mit großem Engagement organisiert.

Die Leistungen der Roboter werden nach einem komplizierten Punktesystem bewertet, das für Zuschauer kaum zu durchschauen ist. Am ehesten nachvollziehbar ist die Mobilität. Wenn ein Roboter an einer Rampe scheitert, ist das für jeden unmittelbar zu erkennen. Ein Roboter des japanischen Teams Shinobi etwa überschlug sich gleich zu Beginn seines Einsatzes beim Versuch, eine Treppe zu überwinden. Der Operator hatte das Hindernis möglicherweise zu beherzt angesteuert. Der Unfall kann allerdings auch auf einen Konstruktionsfehler, etwa einen falschen Schwerpunkt, hindeuten.
Die Gestaltung der Benutzeroberfläche zur Steuerung der Roboter ist ein weiterer wichtiger Aspekt. Um die Maschinen sicher durch eine unbekannte Umgebung manövrieren zu können, müssen die Sensordaten auf eine leicht zugängliche Weise aufbereitet werden. Zur Beurteilung des Kamerabildes sind zum Beispiel zusätzliche Daten über die gegenwärtige Lage des Roboters erforderlich. Erfahrung mit Computerspielen ist für die Bediener der Roboter grundsätzlich von Vorteil. „Man sieht rasch, wer ein Gamer ist“, sagt Andreas Birk von der Jacobs University Bremen. „So jemand kommt in der Regel sehr schnell mit der Steuerung zurecht.“
Damit Rettungskräfte schnell zu Überlebenden vordringen können, müssen deren Positionen möglichst genau auf Karten markiert werden, die von den Robotern aufgrund der Sensordaten möglichst autonom erstellt werden. Hier hat sich diesmal wieder das Team Resko von der Universität Koblenz hervorgetan. Während sie bei den RoboCup German Open im April in Hannover noch Probleme mit Bodenneigungen hatten, die zu falschen Entfernungsdaten des Laserscanners führten, haben sie ihren autonom fahrenden Roboter jetzt mit einem Neigungssensor ausgestattet, der diese Fehler kompensiert.

Autonome Funktionen sind auch für die ferngesteuerten Rettungsroboter wichtig, weil sie die Bedienung erleichtern. So ist etwa der mehrteilige Kettenantrieb mit beweglichen Flippern gegenwärtig und wohl auch für die nächsten Jahre die Technologie, die die größte Mobilität ermöglicht. Jedoch ist es sehr schwierig, die für die jeweiligen Hindernisse passenden Winkel der Flipper einzustellen. Adam Jacoff erwartet, dass das in den kommenden Jahren mehr und mehr von den Robotern automatisch geleistet wird.
Die komplett autonom fahrenden Robotern könnten hingegen in eine neue Liga wechseln. Heute (Samstag) soll es unter dem Titel RoboCup@Space auf einem Beachvolleyballfeld erstmals Demonstrationen einer möglichen neuen Liga geben. Grundsätzlich sind die Anforderungen an Weltraumroboter ähnlich denen für Rettungsroboter. Aufgrund der hohen Signallaufzeiten etwa zwischen Erde und Mars kommt Fernsteuerung jedoch in der Regel nicht in Frage. Insofern könnte es zukünftig zwei Ligen für Roboter in unstrukturierten Umgebungen geben: die Rescue League für ferngesteuerte und RoboCup@Space für autonome Roboter. Allgemein ist die Stimmung beim RoboCup gegenüber der Einrichtung neuer Wettbewerbe allerdings eher zurückhaltend.

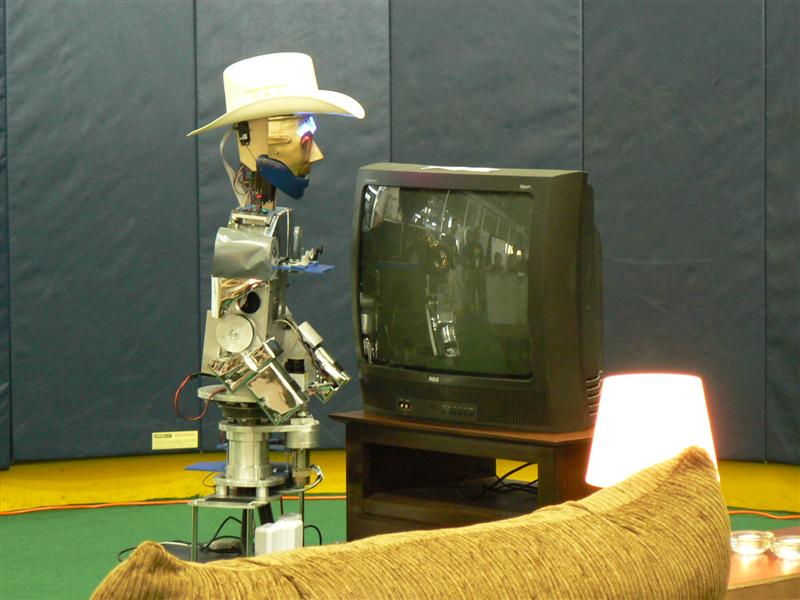
Der im vergangenen Jahr erstmals ausgetragene Wettbewerb RoboCup@Home für Serviceroboter ist jedoch als zweite anwendungsorientierte Liga bereits anerkannt und erfreut sich reger Beteiligung. Der Schwerpunkt liegt hier bei der Mensch-Maschine-Interaktion, die in einer nachgestellten Wohnumgebung getestet wird. Die Roboter müssen unterschiedliche Aufgaben jeweils innerhalb von zehn Minuten bewältigen, etwa einem Menschen folgen, auf gesprochene Befehle hin bestimmte Punkte ansteuern oder Gegenstände greifen. In einer Open Challenge können die Teams die Fähigkeiten ihrer Roboter außerdem in frei gewählten Aufgabenstellungen demonstrieren. „Bei der Navigationsaufgabe gibt es verschiedene Schwierigkeitsgrade“, sagt Tim Niemüller vom Weltmeisterteam AllemaniACs (RWTH Aachen). „Zunächst geht es nur darum, Punkte wie Fernseher oder Kühlschrank anzusteuern. Im zweiten Durchgang werden dann mehrere Hindernisse in der Umgebung verteilt.“ Denen muss der Roboter dann ausweichen oder unter Umständen einen völlig neuen Weg planen, also statt vor dem Fernseher hinter ihm vorbei fahren.
Dass das alles andere als einfach ist, zeigte der Roboter des mexikanischen Teams Pumas-UNAM: Der blieb auf dem Weg zum Kühlschrank neben dem Bücherragel hängen und lief nur noch auf der Stelle hin und her, weil seine Selbstlokalisierung zu ungenau war.
Ein anderes Problem, mit dem mehrere Teams auch in den anderen Ligen zu kämpfen haben, ist nicht technischer Natur: Viele Kisten liegen noch am Flughafen beim US-Zoll. Daher konnten auch die Mitglieder des Teams IAIS/BIT Robots ihren auf dem Outdoor-Volksbot basierenden Roboter noch nicht komplett zusammenbauen. Die Aufgabe, einem Menschen zu folgen, bewältigte er aber auch in der unvollständigen Version problemlos.
Zur RoboCup-WM 2007 siehe auch:
- Wettbewerb ist nicht alles
- Wer sprintet am schnellsten die zwei Millimeter?
- Abschied vom Aibo
- Entscheidend ist auf'm Platz
- Guter Auftakt bei den Junioren
- Wettkampf der Ligen
- Der Nachwuchs hat den ersten Anstoß
Siehe zu dem Thema Robotik auch das c't-Roboterprojekt:
Zu den Roboterfußball-Wettbewerben und der Robotik-Forschung siehe auch:
- An der langen Leine, Roboter im Sicherheitsdienst, c't 9/07, S. 82
- Mobile Maschinen, Robotik und Nachwuchsförderung auf der Hannover Messe, c't 9/07, S. 30
- Mehr als nur Fußball, RoboCup-WM wird erstmals in Deutschland ausgetragen, c't 13/06, S. 98
- KI auf dem Fußballfeld, Praktische Forschung bei der RoboCup-Weltmeisterschaft, c't 13/06, S. 102
(Hans-Arthur Marsiske)/ (je)
