

Tauchroboter mit Köpfchen: Cuttlefish erledigt Aufgaben autonom
Der Tauchroboter Cuttlefish kann für Wartungsarbeiten an Offshore-Anlagen eingesetzt werden. Die Missionen kann er eigenständig oder teilautonom durchführen.
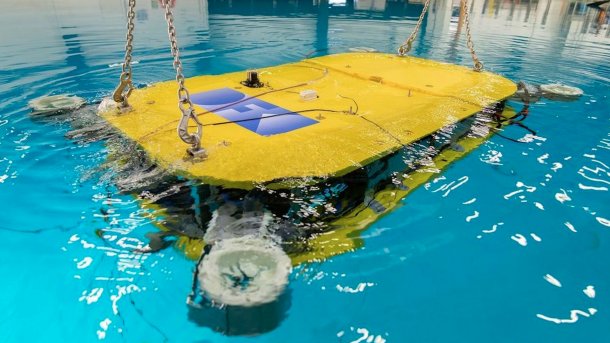
(Bild: Thomas Frank / DFKI)
Das Bremer Robotics Innovation Center des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI) hat im Rahmen des Projektes Mare-IT zusammen mit Partner ein autonomes Unterwasserfahrzeug (Autonomous Underwater Vehicle – AUV) entwickelt, das im Meer etwa Inspektions- und Wartungsarbeiten an Offshore-Windkraftanlagen und Erdgasförderanlagen erledigen kann. Neben der Durchführung autonomer Missionen kann Cuttlefish auch teilautonom arbeiten.
Cuttlefisch ist mit einer Größe von 2,8 m x 2 m x 0,8 m recht üppig und hat ein Gewicht von 1200 kg. Angetrieben wird das AUV von acht elektrischen Triebwerken, die der Spezialist für hochdynamische Servomotoren Wittenstein Cyber Motor beisteuert, wie sich aus den Daten des DFKI entnehmen lässt. Die Triebwerke generieren einen Schub von bis zu 500 Newton (N) und beschleunigen das AUV auf maximal 4 Knoten (kn), etwa 7,4 km/h. Nach Angaben des DFKI sollen sich die Motoren per Servoumrichter präzise ansteuern lassen, sodass sich das AUV frei im Wasser positionieren lässt, etwa um sicher an Unterwasserstrukturen andocken zu können. Die Motoren sollen eine Tauchtiefe von 6000 m standhalten. Ganz so tief taucht Cuttlefisch dann aber wohl nicht. Als initiale Tauchtiefe wird 300 m angegeben, je nach Konfiguration, heißt es vom DFKI. Die Energie liefern zwei Lithium-Eisenphosphat-Akkus (LiFePo) mit 5 kWh bei 50 V.
Autonome oder teilautonome Missionen
Um Inspektions- und Wartungsarbeiten an Offshore-Infrastrukturen wie Windkraftanlagen oder Öl- und Gasanlagen auszuführen, umfasst Cuttlefish zwei druckkompensierte tiefseetaugliche Arm mit Greifern, mit denen Arbeiten unter Wasser durchgeführt werden können. Die Operationen können vollautonom oder teilautonom erfolgen. Dazu hat das AUV eine Reihe von Sensoren an Bord, um die Umgebung wahrnehmen zu können. Neben Sonarsensoren, Magnetometer und Laserscanner sind auch drei Kameras an Bord. Die dabei anfallenden Datenströme zur Auswertung der Sensordaten werden dezentral direkt auf dem AUV analysiert und verarbeitet. Eine KI ermöglicht das selbstständige Durchführen von Missionen. Für die Rechenaufgaben ist ein Computersystem auf Basis eines Intel i7-8700 verantwortlich. Es übernimmt zusätzlich Navigationsaufgaben. Flankiert wird das System von drei Odroid XU4 Einplatinencomputer.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes YouTube-Video (Google Ireland Limited) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (Google Ireland Limited) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Grundsätzlich werden die Operationen von einem Operator überwacht. Ein virtueller Copilot, der am Forschungsbereich für Kognitive Assistenzsysteme des DFKI entwickelt wurde, unterstützt das Personal im Leitstand bei teilautonomer Anwendung. Angebunden ist Cuttlefish dann über eine Glasfaserverbindung.
Über eine Microsoft Hololens AR-Brille können etwa Sensorinformationen, Messwerte und Warnungen eingeblendet werden. Das funktioniert per Sprachbefehle. Per Sprache steuert der Operator auch die Kameras, unterstützt von einem Eyetracking-System. Wie das DFKI in einer Mitteilung schreibt, können auch eigene Sprachbegriffe definiert werden, um etwa Kamerabewegungen oder Andockpositionen zu steuern. Rückmeldungen erhalten die Operatoren ebenfalls per Sprache, wie das Video zeigt.
Videos by heise
Im praktischen Einsatz ist Cuttlefish noch nicht. Das DFKI spricht von einem Demonstrationsmodell. Derzeit stehe man in Verbindung mit dem Bundesministerium für Bildung und Forschung, um das AUV für die Bergung von Weltkriegsmunition in der Nord- und Ostsee einzusetzen. Die Beseitigung der Altlasten sei erforderlich, um die sichere Anbindung etwa von Offshore-Windkraftanlagen per Unterseekabel zu ermöglichen. An einem entsprechenden Antrag werde derzeit gearbeitet.
Cuttlefish ist Teil des Mare-IT-Projektes, das vom Bundesministerium für Bildung und Forschung und dem Deutschen Zentrum für Luft- und Raumfahrt e.V. gefördert wurde. Unter der Leitung des DFKI arbeiteten als Partner Wittenstein Cyber Motor sowie SAP SE und das Rosen Technology and Research Center zusammen. Die Ergebnisse der gemeinsamen Arbeit sind auf der Hannover Messe 2022 im Future Hub auf dem Stand des DFKI zu sehen. Cuttlefish ist allerdings nicht vor Ort, sondern lediglich in einem Video zu sehen.



(olb)