
{kind=link}
Gartenbaustelle
Tipps für den Bau eines FarmBot
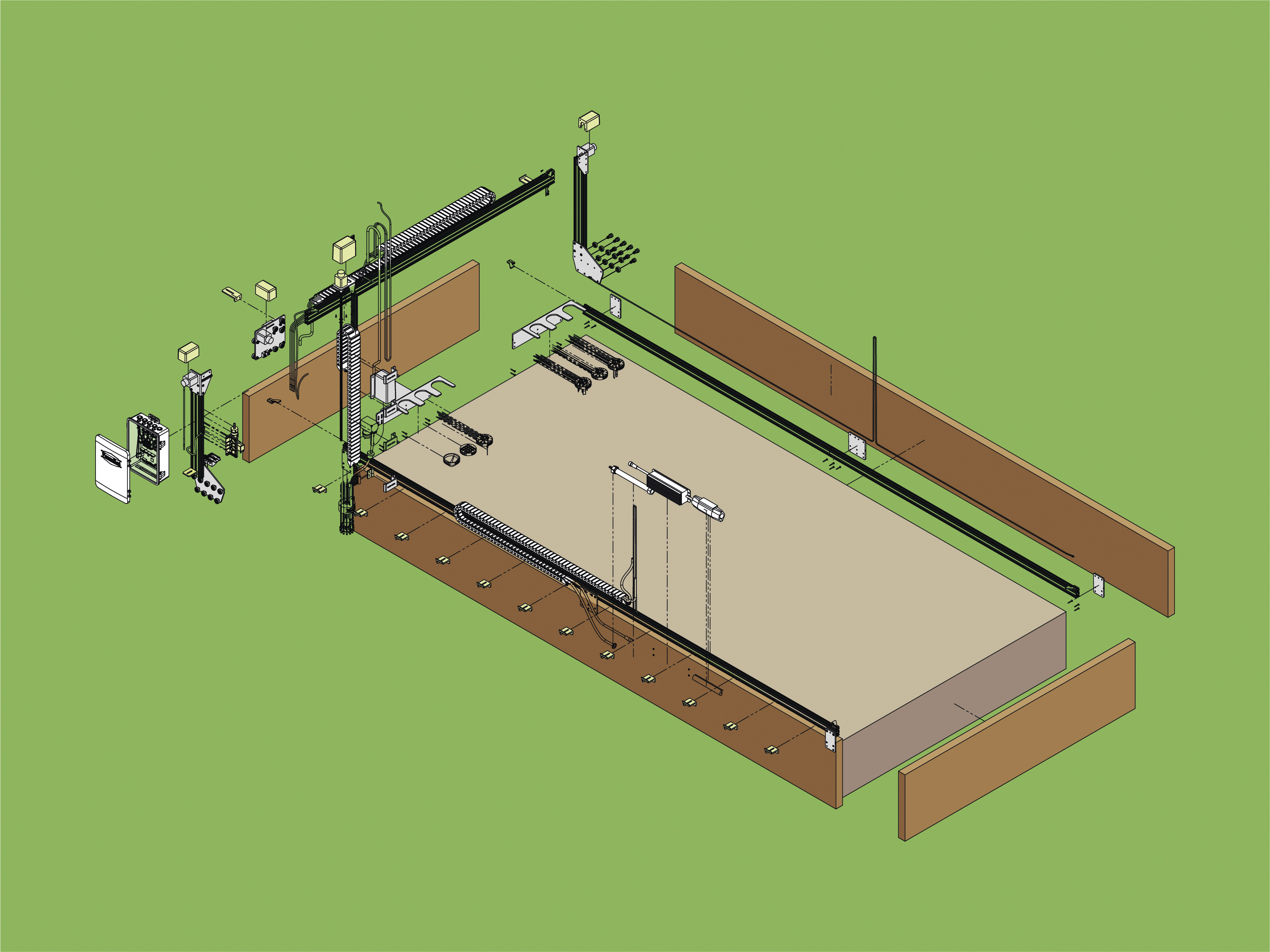
Schon allein wegen der Abmessungen von 1,5 × 3 Metern ist der FarmBot ein großes Projekt. Mit unseren Tipps und der guten offiziellen Anleitung bauen Sie den automatischen Gärtner zusammen, auch ohne Maschinenbaustudium.
Der Bau eines FarmBot besteht aus drei Schritten: Zuerst bereiten Sie den Bauplatz im Garten vor und zimmern ein Hochbeet zusammen. Da dieses einen Strom- und einen Wasseranschluss haben muss, ist dieser Schritt erstaunlich komplex. Danach schrauben Sie in der Werkstatt Baugruppen des FarmBots zusammen und verdrahten den größten Teil der elektrischen Komponenten. Im dritten Schritt installieren Sie Schienen und Portal im Garten, schließen Strom und Wasser an, richten das Betriebssystem ein und stellen den einwandfreien Lauf aller drei Achsen sicher.
Bei all diesen Schritten dient Ihnen die offizielle Dokumentation als Anleitung. Sie leitet Sie schrittweise durch den Bau und weist auf typische Fehlerquellen hin. Bei Problemen hilft Ihnen die offizielle FAQ weiter. Klärt auch diese das Problem nicht, sollten Sie nicht davor zurückschrecken, ins CAD-Design hineinzuschauen. Das wurde im browserbasierten CAD-Programm Onshape erstellt, sodass Sie es anschauen können, ohne ein Programm installieren zu müssen. Wie Sie in Onshape navigieren, haben wir am Bespiel vom FarmBot in [1] erklärt. Einen Link zu beiden Dokumenten und zum öffentlichen CAD-Design finden Sie über ct.de/yh7c.
Wir haben einen knapp 1,5 × 3 Meter großen FarmBot Genesis in Version 1.5 gebaut und dabei genug über die Maschine gelernt, um Ihnen einige wertvolle Tipps für den Bau Ihres eigenen FarmBot auf den Weg geben zu können. Wenn Sie sich noch nicht sicher sind, ob Sie einen FarmBot bauen und besitzen möchten, erlaubt Ihnen unser Baubericht, einzuschätzen, ob Sie sich das Projekt zutrauen.
Roboterwahl
Bevor es losgeht, müssen Sie sich zuerst für ein Modell entscheiden. Es gibt den FarmBot Genesis mit allen Funktionen, der selbst Werkzeuge wechseln kann, und den erheblich billigeren FarmBot Express mit einem nicht erweiterbaren Universalwerkzeug. Jede der beiden Maschinen können Sie auch als XL-Variante in doppelter Breite und mit doppelter Länge bauen. Da Sie die Größe Ihres FarmBot einfach in der Software einstellen, funktionieren auch kleinere Abmessungen, falls Sie ein bestehendes Hochbeet nachträglich automatisieren möchten.
Beim FarmBot Express sollten Sie bedenken, dass sein Portal einfach auf den Seitenbrettern des Hochbeets rollt. Diese müssen daher sehr gerade sein und eine glatte Oberseite aufweisen. Passendes Konstruktionsholz ist möglicherweise nicht leicht im Baumarkt zu bekommen. Drei Meter lange Bretter verbiegen oder verwinden sich schnell, besonders bei wechselnder Feuchtigkeit. Für den Genesis sind die Anforderungen ans Hochbeet geringer, da er auf Aluprofilen rollt, die an die Seiten des Hochbeets geschraubt werden. Wir dachten, wir hätten ein perfekt maßhaltiges Hochbeet gebaut, mussten nach dem Befüllen allerdings auf einer Seite Klötzchen zwischen Brett und Profilhalterung schrauben, um die verzogene Seitenwand auszugleichen.
{kind=link}
Der zweite Faktor für den großen Preisunterschied ist der Werkzeugkopf. Beim Express ist dort ein Universalwerkzeug mit einem ausgehöhlten Kunststoffkegel angeschraubt. Durch das Loch kann er Samen mit einer Vakuumpumpe ansaugen. Da die Spitze aber auch als Jätwerkzeug dient, hinterlässt sie ein breites Loch im Boden. Beim Jäten zupft der FarmBot nämlich nicht nach Unkraut, sondern er ersticht es von oben.
Zum Gießen läuft Wasser beim Express einfach seitlich am Kegel entlang. Der Genesis hat an gleicher Stelle einen Werkzeughalter, an dem magnetisch Werkzeuge andocken. Zum Säen nutzt er Kanülen mit austauschbarer Dicke, sodass die Vakuumpumpe auch sehr kleine Samen ansaugen kann. Das Jätwerkzeug besitzt vier Kunststoffklingen statt einer breiten Spitze und das Bewässerungswerkzeug ähnelt mit vielen kleinen Löchern einer kleinen Gießkanne. Zum Standardrepertoire gehört außerdem ein Werkzeug mit einem Bodenfeuchtesensor, den der Express gar nicht besitzt. Der Werkzeughalter kontaktiert sogar noch zusätzliche elektrische Kontakte durch und neben Anschlüssen für Wasser und Vakuum gibt es einen freien Schlauchanschluss für Erweiterungen wie eine Düngerflüssigkeit. Beim Genesis kann man leicht eigene Werkzeuge konstruieren, die die Fertigkeiten des Roboters erweitern. In einer „Tool Bay“ parkt der Genesis die Werkzeuge und kann sie automatisch tauschen.
Hochbeet
Ein FarmBot braucht zwingend ein Hochbeet. Sonderlich hoch muss das allerdings nicht sein. Die offizielle Doku empfiehlt einen Rahmen aus 30 Zentimeter hohen Brettern – wahrscheinlich die billigste Konstruktion. Die Entwickler haben auch mal einen gigantischen 10 × 3 Meter großen FarmBot gebaut, dessen Aluprofile auf betonierten Pfosten ruhen – ebenfalls eine funktionierende Konstruktion.
{kind=link}
Wir wollten uns nicht bücken müssen und haben unser Beet gut 80 Zentimeter hoch gebaut. Bei dieser Höhe konnten wir die Unterseite mit einem Gitter gegen Wühlmäuse absichern und hatten an der Außenseite genug Platz für einen Schneckenzaun, der den salatvertilgenden Nacktschnecken den Zugang verwehrt. Damit der Schneckenzaun funktioniert, mussten wir den Wasser- und Stromanschluss innen im Beet nach oben führen, da Kabel und Rohr den Schnecken sonst als Brücke gedient hätten.
Als Holz nutzten wir Terrassendielen aus Douglasie, da der hohe Harzgehalt dieses Holz auf natürliche Weise vor Verwitterung schützt. Allein auf das Harz wollten wir uns jedoch nicht verlassen und haben die Planken zusätzlich mit Bootsöl gestrichen. Zusammengehalten wird unser Beet mit Winkelprofilen aus Aluminium und Schlossschrauben aus Edelstahl. Die Konstruktion macht mehr Arbeit als der Vorschlag aus der FarmBot-Doku. Falls sie Ihnen gefällt, finden Sie eine CAD-Zeichnung unseres Beets mit allen Maßen über ct.de/yh7c.
Ein tiefes Hochbeet erlaubt den Luxus, in seinen tieferen Schichten Biomasse unterzubringen, die über mehrere Jahre zerfällt und dabei kontinuierlich Nährstoffe an den Boden im Beet abgibt. Wir haben die unteren 40 Zentimeter mit grobem Baum- und Heckenschnitt befüllt und danach eine Schicht frischen Kompost ausgebreitet. Darüber kam dann eine Schicht des am FarmBot-Bauplatz vorherrschenden Lehmbodens, danach eine Schicht Herbstlaub und im Frühjahr zuoberst fünf Zentimeter Komposterde. Wenn Sie Ihr Hochbeet so oder so ähnlich befüllen, starten Sie im ersten Jahr mit sehr nährstoffreicher Erde, in der alle Gemüse gut gedeihen. Der Nährstoffgehalt nimmt in den Folgejahren zwar ab, wegen der eingebrachten Biomasse aber langsamer als in üblichen Gemüsebeeten. Falls Sie für Ihren Standort unsicher sind, ob die Erde zu mager sein könnte, nehmen Sie eine Bodenprobe und schicken sie zur Laboranalyse. Für unseren Standort ergab die Bodenanalyse keinen Düngebedarf.
{kind=link}
Wer im Frühjahr besonders früh anfangen möchte, kann das Beet nachts mit einer Folie abdecken. Damit die Folie die kleinen Pflänzchen nicht niederdrückt, haben wir sie über bogenförmige Abschnitte eines Plastik-Wasserrohrs von 1,6 Metern Länge gespannt. Die Befestigungen dieser Bögen an der Beetwand kommen aus dem 3D-Drucker, die Vorlagen finden Sie über ct.de/yh7c. Wenn Sie den letzten Frost im April abwarten, können Sie sich diesen Schritt sparen.
Teileselbstbau
Wer wie wir viele Teile selbst baut, kann durchaus einiges an Geld sparen. Der FarmBot besteht größtenteils aus Standardteilen, die Sie bei Händlern für CNC-Bedarf wie RatRig bekommen. Dort bekommen Sie millimetergenau zugeschnittene Aluminium-V-Profile und auch die kugelgelagerten Kunststoffrollen, die in den V-Nuten laufen. Der FarmBot braucht außerdem so viele M5-Linsenkopfschrauben, dass wir den Mindestbestellwert vom Schraubengroßhändler erreichten. Die Liste aller Einzelteile finden Sie in der Dokumentation unter „Bill of Materials“.
Flache 5-mm-Aluplatten haben wir selbst geschnitten und gebohrt. Die Außenmaße müssen hier nicht sonderlich exakt sein, wir waren aber froh, für die Achsenlöcher der Rollen einen Kreuztisch genutzt zu haben, da die obere Lochreihe exakt fluchten sollte.
{kind=link}
In der Konstruktion kommen auch abgewinkelte Aluteile vor, die wir als Einzelteile im FarmBot-Shop bestellten, da uns die Maschine zum Abwinkeln fehlte. Im Shop bestellten wir außerdem das Mainboard „Farmduino“ des Genesis 1.5, das Universal Tool Mount (UTM) samt Kabel und die Motoren mit angeflanschten Dreh-Encodern. Die Encoder registrieren optisch, wie weit sich die Motoren drehen, womit die Elektronik erkennen kann, wenn ein Motor blockiert. Die Kombination aus diesen Nema-17-Motoren und Encodern ist ziemlich unüblich und erscheint auf den ersten Blick teuer. Wir haben den chinesischen Hersteller identifiziert und einen Preis für vier Motoren erfragt: Der FarmBot-Shop bot sie mehr als 100 Dollar billiger an. Vermutlich würden auch Schrittmotoren mit angeflanschten Encodern mit 1000 statt 360 Schritten funktionieren. Die Firmware erlaubt, den Faktor zwischen Schrittzahl des Motors und des Encoders einzustellen. Wir wollten aber nah am Original bleiben und haben die 1000-Schritt-Encoder nicht getestet. Einige Teile wie die Energieketten bot der Shop günstig an, während andere Komponenten sehr teuer waren. Wer wie wir dort Einzelteile einkauft, sollte unbedingt Preise vergleichen.
Wenn Sie einen 3D-Drucker besitzen, können Sie bei den Plastikteilen einiges sparen. Die Teile im Originaldesign sind für die Herstellung in einer Spritzgussmaschine optimiert. Um es beim 3D-Druck einfacher zu haben, haben wir einige Teile äußerlich umkonstruiert. Falls Sie auch drucken wollen, finden Sie unser abgeleitetes Design mit den geänderten Teilen über ct.de/yh7c.
Die Riemenbefestigung ist eigentlich als gestanztes Aluteil vorgesehen. Per Hand war uns das zu kompliziert zu fertigen, sodass wir die Teile 3D-gedruckt haben. Bisher scheint die Stabilität völlig auszureichen. Aus Neugier haben wir die Teile später mit der OX-CNC [2] aus Alu gefräst, was hervorragend funktioniert hat. Wer eine CNC-Fräse hat, kann die Aluplatten damit sehr maßhaltig fertigen.
{kind=link}
Als wir im Sommer 2020 mit dem Bau begannen, waren im FarmBot-Shop nur das UTM-Kabel und das Motor- und Encoderkabel der Y-Achse lieferbar. Nach den richtigen Steckern, um die Kabel selbst bauen zu können, mussten wir ganz schön suchen: An den Encodern sind Molex-Stecker der Serie 502380 mit neun Pins (Pinabstand 1,25 mm) richtig, Stromanschluss und Peripherie am Farmduino laufen über Molex WM16859-ND. Für den Anschluss der Schrittmotoren haben wir vergeblich nach Dupont-Steckern mit Verschluss gesucht, letztlich haben die üblichen unverschlossenen Stecker mit 2,54 mm Pinabstand funktioniert. Die Kabel selbst zu crimpen war eine ziemliche Fummelei und hat sich wegen horrender Versandkosten für die speziellen Stecker auch finanziell nicht gelohnt. Falls Sie die Kabel fertig kaufen können, empfehlen wir Ihnen, das Geld zu investieren.
Zusammenbau
Mit den Teilen aus dem Bausatz, egal ob selbst gefertigt oder fertig bestellt, ist der Zusammenbau ein Genuss! Die Anleitung führt Sie Schritt für Schritt durch den gesamten Bau und beantwortet nebenbei die meisten Fragen. Die Freude dauert etwa zwei Wochenenden. Sie können das Portal weitgehend drinnen vormontieren. Die Anleitung schickt Sie früher raus als nötig. Drinnen sollten Sie aber genug Platz vorsehen: Selbst unser „kleiner“ Genesis 1.5 hat ein anderthalb Meter langes Portal und die Z-Achse steht über einen Meter hoch nach oben weg!
Beim Verlegen des Wasserschlauchs können Sie sich das Einfädeln in die Energiekette erleichtern, wenn Sie ein 90°-Knie am Übergang zwischen Y- und Z-Achse einbauen. Dadurch muss der Schlauch nicht so ewig lang sein und es besteht an der Ecke keine Gefahr eines Knicks, der den Wasserfluss verschließen könnte. Beim Ende des Schlauchs haben Sie auch Wahlmöglichkeiten: Die Anleitung sieht das Magnetventil am Seitenprofil des Portals vor, wir haben es dagegen an der Seitenwand vom Hochbeet angeschraubt. Uns erschien es sinnvoll, es direkt hinter dem von uns zusätzlich verbauten Absperrhahn zu befestigen. Die 3D-gedruckten Halter dafür finden Sie im Onshape-Design über ct.de/yh7c.
Der UTM-Anschluss auf dem Farmduino-Board funktioniert nur, wenn man rechts davon fünf Jumper für die fünf bei den Standardwerkzeugen verwendeten Pins setzt. Ohne diese bleibt das UTM stromlos und erkennt nicht, ob der Werkzeugwechsel geklappt hat. Wer weitere Pins für Erweiterungen nutzen will, findet Anschlüsse für Jumperkabel unterhalb des UTM-Steckers auf dem Board.
{kind=link}
In der Elektronikbox ist nicht genug Platz, um darin Schlaufen für zu lange Kabel zu legen. Wir wollten trotzdem Ordnung halten und haben an die Rückseite einen Halter für Kabelbinder geschraubt. So bleiben kleine und große Kabelschlaufen, wo sie sein sollen und verhängen sich nicht in der Mechanik der Achsen.
{kind=link}
Die Schienen müssen am Hochbeet völlig parallel zueinander verlaufen. Auch wenn das Portal im Prinzip Scherbewegungen von wenigen Millimetern mitmachen würde, entstünde dadurch zu viel Reibung. Nehmen Sie sich lieber etwas mehr Zeit, um die X-Schienen parallel und eben auszurichten. Der Boden unter unserem Hochbeet hatte sich beim Befüllen auf einer Seite abgesenkt, weshalb wir nicht nach Wasserwaage ausrichten konnten. Stattdessen maßen wir die Diagonalen und die Breite an den Enden und in der Mitte. Unser FarmBot neigt sich jetzt um knapp 2° nach links, zu dieser etwas schrägen Bezugsebene stimmt aber alles.
Beim Aufsetzen des Portals sollten Sie zunächst die Schrauben an der Querverbindung offen lassen, damit die Breite des Portals einstellbar bleibt. Stellen Sie die Rollen dann ungefähr ein und verschieben Sie die Portaloberkante, bis die Wangen orthogonal zum Querprofil ausgerichtet sind. Sobald das fest ist, sollten Sie die Rollen noch mal nachjustieren: Stellt man mit den Exzentermuttern einen Anpressdruck wie bei einer Portafräse ein, sind die beiden X-Motoren zu schwach, um das Portal zu bewegen. Ihr Ziel sollte stattdessen ein sehr leichtgängiger Lauf ohne Klappern oder Wackeln sein. Gleiches gilt für die Riemen, die weniger Spannung haben dürfen, als Sie von 3D-Druckern gewöhnt sind.
Inbetriebnahme
Für die Software beschreiben Sie eine Micro-SD-Karte genau wie beim Raspberry Pi OS. Das FarmBot OS laden Sie dafür von der Webseite herunter (siehe ct.de/yh7c) und bespielen die Karte mit Balena Etcher oder einem vergleichbaren Programm. Legen Sie als Nächstes einen Account bei my.farm.bot an, da Sie die Zugangsdaten beim ersten Boot angeben müssen. Danach stecken Sie die Karte in den Raspi in der Elektronik-Box und verbinden den Farmduino mit dem Strom. Der Farmduino versorgt den Raspi 3 über einen USB-Stecker und ein winziges Kabel mit Strom.
Das FarmBot OS spannt bei der Ersteinrichtung ein eigenes WLAN auf, mit dem Sie sich verbinden und über ein einfaches Webinterface die WLAN-Daten angeben. Bei diesem Schritt teilen Sie dem FarmBot auch die Zugangsdaten zu Ihrem Account bei my.farm.bot mit. Das Farmbot OS auf dem Raspi flasht auch automatisch die neueste Firmware auf den Farmduino. Sie müssen nur einstellen, welche Version des Mainboards Sie besitzen (aktuell ist 1.5, ab Juli 2021 soll es 1.6 geben). Danach startet der Raspi neu, verbindet sich mit dem WLAN und taucht gleich darauf auch bei my.farm.bot auf.
Die Konfiguration und Programmierung laufen nun über die offizielle Weboberfläche, die stets mit dem FarmBot synchronisiert. Navigieren Sie zuerst zu den Einstellungen (das Zahnrad-Symbol in der oberen Leiste). Dort können Sie dem Roboter einen Namen geben, die Firmware neu flashen und das System neu starten.
In den Abschnitten „Axes“, „Motoren“ und „Encoders“ können Sie die Motoreinstellungen festlegen. Für den Bausatz sollten die Standardwerte eigentlich stimmen. Testen Sie zuerst für jede Achse mit dem gelben Button „FIND HOME“, ob sie den Nullpunkt automatisch anfahren kann. Wenn das klappt, können Sie den FarmBot danach mit „FIND LENGTH“ automatisch ausprobieren lassen, wie lang die Achse ist. Der FarmBot bewegt die Achse für beide Funktionen, bis sie anstößt und er mit den Encodern registriert, dass der Schrittmotor Schritte verliert. Ein Rattern ist hier also gewollt.
Motorprobleme
Bei uns klappte die Inbetriebnahme auf Anhieb leider nur bei der Y-Achse. Für die Fehlersuche sollten Sie zuerst die Encoder deaktivieren, da der FarmBot dann Bewegungsversuche nicht frühzeitig abbricht. Testen Sie nun mit dem Bewegungs-Menü (Fadenkreuz-Symbol), ob Sie die Achse 100 Millimeter bewegen können. Mechanische Blockaden sollten Sie mit abgeschalteten Encodern deutlich erkennen können.
{kind=link}
Wir brachten zuerst die Z-Achse mit etwas Kettensägenöl in Gang. Kettensägenöl ist im Gegensatz zu den meisten anderen Schmierölen kein Mineralöl, sondern pflanzlich. Sie sollten zwar ohnehin so sparsam ölen, dass nichts ins Beet tropft. Sollte der Regen aber dennoch etwas in den Boden spülen, landen dort keine Giftstoffe.
Die Schrittmotoren sind standardmäßig auf einen Motorstrom von 600 Milliampere eingestellt. Auf dem Farmduino 1.5 sind TMC2209-Treiber verbaut, die unter Dauerlast bis zu 1200 Milliampere liefern können. Beim Vortrieb für Y- und Z-Achse haben wir 900 Milliampere gewählt.
Bei der X-Achse hatten wir aber sogar mit dem Maximalstrom von 1700 Milliampere Probleme. Eine Seite des Portals setzte sich in Bewegung, der Motor der Gegenseite vibrierte nur. Das zog das Portal schräg, was die Reibung erhöhte und die Maschine völlig blockierte. Interessanterweise konnten wir die Seite, auf der das Problem auftrat, umkehren, indem wir die Kabel für X1 und X2 auf dem Board tauschten. Der Support gab uns diverse Tipps, die X-Achse leichtgängiger zu bekommen, ging aber auf wiederholte Nachfrage nicht auf das offensichtliche elektrische Problem ein. Letztlich stellte sich heraus, dass der X1-Treiber bei unserem Farmduino kaputt war. Die Gewährleistung von FarmBot Inc. beschränkt sich auf 30 Tage nach dem Kauf und da wir beim Direktimport aus den USA nicht auf die gesetzlichen zwei Jahre Gewährleistung der EU zurückgreifen konnten, mussten wir mit dem Schaden leben.
{kind=link}
Letztlich bekamen wir unseren FarmBot aber doch noch zum Fahren. Die Lösung war ein Y-Kabel wie bei der MPCNC [3], mit dem wir beide X-Motoren am X2-Treiber anschließen konnten. Da wir mit den Tipps vom Support die X-Achse sehr leichtgängig eingestellt hatten, reichen 1200 Milliampere für beide Motoren.
Werkzeugwechsel
Sobald der FarmBot fährt, können Sie die „Toolbays“ ans Beet anschrauben. Achten Sie darauf, sie horizontal exakt auszurichten, den Abstand zur Seite und die Höhe können Sie danach einstellen. Wir haben den Abstand zwischen den beiden Haltern so gewählt, dass der Zwischenraum auch ein Werkzeug aufnehmen kann, beispielsweise einen Behälter für die Samen.
Setzen Sie sich anschließend mit einem Notebook neben das Beet und fahren Sie den Kopf des FarmBot exakt zur Position der ersten Toolbay. Die Werkzeuge haben seitlich Nuten, die etwa 1,5 Millimeter Platz zu den Seiten des Halters frei lassen. Mitteln Sie diese Position exakt aus. In X-Richtung sollten Sie mit der Hinterkante der Basis eines Werkzeugs etwa einen Millimeter Platz zum Rand lassen. Das Tool sollte an den Magneten in der Halterung hängen, ohne die Ränder zu berühren. Nur so reicht die Anziehungskraft der Magneten, um das Werkzeug perfekt auszurichten. Bei der Z-Position empfehlen wir, nicht auszumitteln. Wählen Sie hier lieber einen knappen Abstand (etwa einen halben Millimeter) zur oberen Kante der Nut. Das stellt sicher, dass die Magnete das Tool immer bis zum Anschlag anziehen können. Nur in perfekt eingerasteter Position schließt sich der elektrische Kontakt, mit dem der FarmBot prüft, ob das Werkzeug geladen ist (UTM-Pin C ist verbunden mit Pin B, der Masse).
{kind=link}
Die so ermittelte Position übernehmen Sie mit dem blauen Button in der Toolbay-Konfiguration als Position. Wiederholen Sie den Prozess mit allen weiteren Toolbays. Wenn Sie sich für diesen Schritt Zeit nehmen, sparen Sie die später mehrfach, weil nur mit sehr exakten Positionswerten auch Werkzeugwechsel klappen.
Kamera
Die Kamera war eines der Bauteile, die wir nicht im FarmBot-Shop bestellen konnten. Wir haben stattdessen zuerst eine sehr billige USB-Endoskop-Kamera mit gleichen Abmessungen verbaut. Die Bildqualität dieser Kamera konnte uns aber nicht zufriedenstellen. Sie produzierte unscharfe Bilder in niedriger Auflösung, die zum Rand deutlich dunkler wurden. Um systematisch aus mehreren Positionen das ganze Beet abzulichten, ist das ungünstig, da die Foto-Kacheln dann hinsichtlich ihrer Helligkeit nicht aneinanderpassen.
Die Kamera aus dem Bausatz scheint nicht ganz so unterirdisch in der Bildqualität; im Forum beklagten sich aber dennoch einige Nutzer über unschärfere Bilder als in der Dokumentation.
Wir stiegen wegen der schlechten Bilder auf eine etwa 60 Euro teure Endoskopkamera mit HD-Auflösung und deutlich größerem Kopf um. Den 3D-gedruckten Halter dafür und den Link zum Angebot finden Sie über ct.de/yh7c.
{kind=link}
Die teurere Kamera ist ein klares Upgrade, da sie schärfere Bilder ohne dunklen Rand liefern kann. Leider fokussiert sie nicht immer richtig und auch beim Weißabgleich kommen im Automatikmodus nicht unbedingt konsistente Bilder heraus. Leider kann man mit dem FarmBot OS nur die Auflösung umschalten, für manuellen Fokus und Weißabgleich gibt es keine Einstellung. Unser momentaner Workaround schießt vor dem Scannen des Beets einige sinnlose Bilder, in der Hoffnung, dass sich die Automatik auf sinnvolle Werte festlegt.
Im Reiter „Fotos“ muss man die Kamera kalibrieren. Beim Bausatz ist dafür eine Kalibrierungskarte dabei, die Doku bietet auch ein PDF zum Selbstdrucken an. Auf der Karte ist ein Punktmuster, das man unter der Kamera positioniert. Der FarmBot fährt bei der Kalibrierung auf drei Positionen, fotografiert und errechnet den Öffnungswinkel und die Drehung der Kamera automatisch. Das klappt allerdings nur, wenn die weißen Punkte auf dem Kamerabild nicht überstrahlen. Selbst unsere HD-Kamera konnte dafür am Tag kein geeignetes Bild liefern. Die Kalibrierung gelang uns erst gegen Ende des Sonnenuntergangs.
Im Kamera-Reiter kann man auch die Bodenhöhe automatisch bestimmen lassen. Das klappt nur mit scharfen Fotos – dann allerdings recht exakt. Man kann sie aber in der halben Zeit auch einfach per Hand ausmessen.
Energiekette und Frost
Die Energiekette für die X-Achse ist sehr lang. Fährt man das Portal auf die am weitesten entfernte Position, hängt sie zu weit durch. Als Unterstützung sind Halter aus Kunststoff vorgesehen, an denen sich bei uns allerdings manchmal Glieder der Energiekette verhakten. Wir haben auf die Halter deswegen eine Kufe aus einer glatten Gardinenstange geschraubt. Die lässt die Kette nun fast reibungsfrei gleiten.
{kind=link}
An der Y-Achse hatten wir ein Klemm-Problem Anfang März, als die Beet-Foto-Session zum Sonnenaufgang scheiterte, weil Energiekette und Rollen am Aluprofil festgefroren waren. Schaltet man den Wasseranschluss ab, ist der FarmBot durchaus frostsicher, einen Betrieb im deutschen Winter können wir für die in Kalifornien entwickelte Maschine aber nicht empfehlen.
Zwischenfazit
Für ein umfassendes Bild des Projekts FarmBot sollten Sie unseren Artikel über die Programmierung abwarten, der in einer der nächsten Ausgaben von c’t erscheint, da die Programmierung ein entscheidender Faktor für die Beurteilung ist. Aufbau und Mechanik sind ein großes Projekt für Bastler, die zumindest schon mal einen 3D-Drucker oder eine CNC-Fräse zusammengebaut haben sollten. Für uns war es das spannendste Projekt des vergangenen Jahres! Die schiere Größe der Maschine, die vielen Schritte vom Beet bis zur Riemenspannung und die durchdachte Konstruktion begeistern für einen langen Zeitraum. Bei Problemen hatten wir aber auch schlaflose Nächte.
Wenn Sie einen FarmBot bauen, werden Sie auf mechanische und elektrische Probleme stoßen und Sie sollten Lust haben, die zu lösen. Die gute Nachricht ist nämlich, dass keine der Komponenten so exotisch oder komplex ist, dass einer mit c’t-Projekten erfahrenen Bastlerin nicht Lösungen einfallen würden. Der FarmBot ist keine Raketentechnik, sondern ein Einblick in Maschinenbau, den man auch ohne Studium wagen kann.
{kind=link}
Wer sich nur fürs Gärtnern und nicht für Technik interessiert, sollte nur unser Hochbeet bauen und das per Hand bewirtschaften. Im Idealfall fasziniert Sie beides. Dann nämlich ist der FarmBot ein tolles Bastelprojekt mit hervorragender Anleitung, nach dem Sie Gartenbau mit anderen Augen sehen. Ob der FarmBot nach dem Basteln auch Chancen hat, erfolgreich Ihr Gemüse zu umhegen, während Sie zwei Wochen in den Urlaub düsen, verraten wir in einer der nächsten c’t-Ausgaben. (pmk@ct.de)
Bauanleitung, erweiterte CAD-Designs, Druckvorlagen: ct.de/yh7c