Roboter "ernährt" sich durch Biomasse
Ein DARPA-gefördertes Projekt entwickelt energieautarke Roboter für militärische und zivile Zwecke, die Biomasse ebenso wie konventionelle Treibstoffe verwerten
Die Roboter-Plattform muss als Allesfresser agieren, um das nötige Durchhaltevermögen für militärische Dauereinsätze zu gewinnen. Inspiriert von biologischen Organismen kann sie selbst auf "Futtersuche" gehen und sich verlorene Energie aus der Vegetation in der Umgebung zurückholen. Nach den Vorstellungen ihrer Entwickler soll sie alle Energiequellen biologischer Herkunft verwerten, aber ebenso auf herkömmliche Treibstoffe zurückgreifen können wie Benzin, Kerosin, Diesel, Propangas, Kohle oder Speiseöl.


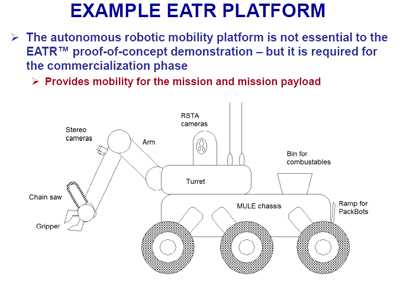
Robot Technology konzipierte den "Energetically Autonomous Tactical Robot" (EATR) bereits im Jahr 2003. Im Jahr 2008 stieg die Defense Advanced Research Projects Agency (DARPA) in die Förderung ein. Für die Rundum-Futterverwertung steuert Cyclone Power Technology eine externe Hybrid-Verbrennungsmaschine bei. Sie soll wiederum die Akkus nachladen, deren elektrische Leistung Sensoren, Prozessoren, Steuerung – und natürlich den Robotarm mit Greifer in Betrieb hält, damit der Roboter weitere Biomasse in sich hineinschaufeln kann.
Das Konzept beschreibt EATR als "ein autonomes Roboterfahrzeug, das für unbegrenzte Langstrecken-Einsätze mit hoher Dauerbelastung geeignet ist, ohne auf konventionelles Nachtanken angewiesen zu sein". Damit sei es insbesondere für gefährliche militärische Aufgaben geeignet wie Aufklärung, Überwachung und Zielfindung. Erwähnung findet die Fähigkeit, "Territorium zu besetzen und unbegrenzt lange Aufgaben zu erfüllen mittels Sensoren oder Waffen". Zudem könnten die Systeme unbemannte Fluggeräte bei ihren Einsätzen ergänzen.
Einer Musterrechnung zufolge ist EATR ein relativ guter Futterverwerter, der eine ordentliche Strecke weit kommt, bevor er neue Nahrung suchen und verarbeiten muss. Aus eineinhalb bis rund fünf Kilogramm trockener Vegetation, gemeint sind Holz oder Pflanzen, könne er eine Kilowattstunde erzeugen. Diese wiederum sei gut für eine Fahrstrecke von drei bis zwölf Kilometern, eine Standby-Zeit von über 80 Stunden oder eine Einsatzzeit von 6 bis 75 Stunden, abhängig von der dafür erforderlichen Leistung. 70 kg Biomasse sollen die Robot-Plattform 160 km weiter bringen.
In der von der DARPA geförderten Phase II des Projekts ("proof-of-concept demonstration") geht es vor allem um die Fähigkeit von EATR, Biomasse-Energiequellen von Stoffen zu unterscheiden, die keine Energie liefern, sie richtig zu verarbeiten, die Biomasse aufzunehmen und aus ihr elektrische Energie für die verschiedenen Subsysteme zu erzeugen.
An der Entwicklung von EATR beteiligt ist unter anderem das Intelligent Systems Laboratory der University of Maryland. Weitere Partner sollen in der späteren Phase III hinzukommen, die auf die kommerzielle Nutzung des Projekts zielt mit der Entwicklung von Prototypen und einsatzfähigen EATR-Systemen für militärische und zivile Anwendungen. Praktische Einsatzmöglichkeiten erwartet Robotic Technology auch in "Homeland Security" sowie Land- und Forstwirtschaft.