

Passive gripper: robotic lizard climbs rough, vertical surfaces
Climbing vertical, rough surfaces is a challenge for robots. Loris manages this with passive grippers and special climbing tactics.
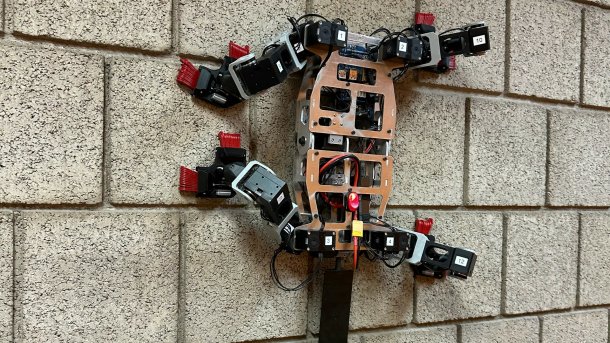
The Loris robot clings to vertical surfaces with its passive microspin gripper system.
(Image: Carnegie Mellon University)
A research team at Carnegie Mellon University has developed a type of robotic lizard that can climb vertical rough surfaces. In contrast to similar robots, which often rely on suction systems for a secure grip on the surface, the scientists use a passive gripping system and an optimization-based control system for more balanced weight distribution.
Climbing vertical walls with rough surfaces is a particular challenge for robots, as suction mechanisms typically cannot be used satisfactorily to generate grip for the robot due to the porous material. Microspin grippers are better suited for this. With each step, they release small hooks that cling to the surface. Such passive systems rely on the weight of the robot to find a grip. They are well suited to smooth surfaces, but have problems on uneven surfaces. Various climbing tactics must then be used to compensate for this shortcoming.
One way around this is to use active microspin grippers. They use electric actuators that insert hooks into the surface to generate grip. Although such systems are effective, they are usually bulky, energy-intensive and mechanically complicated, so that only a low running speed can be achieved, say the CMU scientists.
Microspines and DIG climbing tactics
For their Lightweight Observation Robot for Irregular Slopes (LORIS), they are relying on a different system, which they describe in the previously unpublished scientific paper "LORIS: A Lightweight Free-Climbing Robot for Extreme Terrain Exploration" (PDF). The researchers use feet with splayed microspin grippers for their four-legged robot. The robot's ankles are passive, allowing the grippers to react to the movements of the legs and adapt to the ground independently.
Videos by heise
However, the trick to being able to move on vertical, rough surfaces lies in a sophisticated climbing tactic adopted from insects, known as Direct Inward Grasping (DIG). With the help of integrated depth sensors and microprocessor calculations, the robot strategically positions its legs so that the grippers on the opposite legs simultaneously secure the climbing surface. This reduces the risk of the robot losing its grip. A tail provides support.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes YouTube-Video (Google Ireland Limited) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (Google Ireland Limited) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
The researchers tested the system on vertical surfaces while climbing on cinder blocks, vesicular basalt, slag, and tuff. The scientists investigated how the DIG system fared in comparison to a climbing strategy that was not used. Loris had to climb a one-meter-high wall. He succeeded in six out of ten attempts with the DIG system. Without the system, he only succeeded in one out of ten attempts. Overall, the researchers found that the step failure rate was reduced from 6.4 percent to 2.3 percent with the DIG system.
Optimization required
However, the scientists still see a greater need for optimization. The current reliability is not yet sufficient for Loris to be used in real scenarios. This is because a fall during a mission, for example during disaster operations, could cause the robot to fail. The risk of the robot losing its grip is particularly high on cinder blocks. This is where the CMU scientists want to come in and design a gripper that can adapt to different surfaces. The researchers have in mind instantly engaging passive grippers that enable dynamic climbing movements. They would also improve energy utilization.
However, the scientists have already achieved a major success with Loris, as it is said to be the only robot of its kind that can generate DIG forces using microspines. Weighing in at 3.2 kg, it is also the only robot of its size that can climb irregular vertical rock faces under full gravity.



(olb)