

Researchers build low-cost knee exoskeleton with drone motors
A knee exoskeleton is designed to relieve strain on the back during lifting work and prevent injuries. Costs are low thanks to the use of standard components.
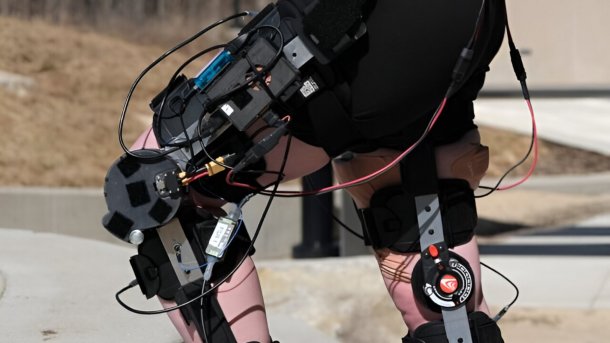
The University of Michigan's knee exoskeleton consists largely of standard components.
(Image: José Montes-Pérez / University of Michigan)
Scientists at the University of Michigan (U-M) have developed a knee exoskeleton using mainly standard components such as commercially available knee supports and drone motors. The exoskeleton is designed to prevent fatigue caused by lifting and carrying and, above all, back injuries at work. By using standard components, the price could be kept low.
With the knee exoskeleton, the researchers at U-M are taking a different approach to other developers. "Instead of directly supporting the back and giving up proper lifting form, we strengthen the legs to maintain it," says Robert Gregg, professor of robotics and co-author of the study. "This is different from what is commonly done in industry."
Conventional exoskeletons used to support lifting and carrying tasks support the back. However, the bulky devices also mean that the natural posture has to be abandoned when lifting. In addition, other movements are severely restricted, meaning that these exoskeletons have to be deactivated in order to be able to perform them.
Standard components and drone motors
The scientists at U-M, on the other hand, want to support the quadriceps muscles in the human thighs, which provide the majority of the force required to lift safely from a squatting position. To this end, the researchers have developed and built a prototype pair of knee exoskeletons that support the quadriceps muscles. According to the study "A versatile knee exoskeleton mitigates quadriceps fatigue in lifting, lowering, and carrying tasks", published in Science Robotics, the back is relieved during lifting and carrying tasks.
Videos by heise
The knee exoskeleton is based on a conventional knee brace, such as those used after sports injuries to the knee joint to relieve the knee. The knee support is driven by motors from larger drones via a gearbox. The gearbox is designed to allow the knee to swing freely.
Software uses a sensor system to determine the angle of the knee joint and the alignment of the thigh and lower leg. Together with a sensor in the user's shoe, software predicts the force absorbed. From the three measurements, which take place 150 times per second, the system can determine which movement the wearer wants to perform and how much support is required for the respective action. It is possible to switch between different movements almost seamlessly.
This is a different approach to many other exoskeleton control systems, explains Gregg. These use predefined patterns for a limited number of movements. In addition, these systems sometimes take a while to determine which movement the user wants to perform next. This could be a problem, for example, if the user wants to go up a flight of stairs but the exoskeleton thinks they want to go down them, says Gregg.
The scientists have developed a controller that combines a physical model with machine learning. This prevents the exoskeleton from performing incorrect movements if the user moves differently than the training data on the activities contained in the controller.
Better posture when lifting weights
The research team tested the knee exoskeleton on five female and five male test subjects. They had to perform squats to fatigue with a 9 kg weight with a handle (kettlebell). The test subjects had prior experience in lifting weights correctly during squats. On another day, the test subjects performed the squats in a rested state. They also had to carry the weight on a flat surface, an incline and when climbing stairs.

The study showed that the participants adopted and maintained a better posture with the knee exoskeleton. This indicates that the exoskeleton can effectively prevent injuries during tiring work. The test subjects were also able to lift the weights more quickly.
The cost of producing the prototypes was 4000 US dollars per pair. In series production, the costs could be significantly reduced to around 2000 dollars per pair, says Gregg.


(olb)