
Winzige, magnetisch steuerbare Roboter für die Medizin
Forscher am Max-Planck-Institut setzen drahtlos gesteuerte, mikrometerkleine Miniroboter aus dem Voxel-Baukasten zusammen. Diese können im Blut mitschwimmen.
(Bild: Rudolf A. Blaha)
Miniaturroboter der Zukunft sind klein genug, um in der Blutbahn zu treiben. Sie lassen sich magnetisch lenken und geben zielgenau Wirkstoffe ab. Sie können greifen, sich an Zellwänden festklammern und Partikel einfangen. Im Grunde gibt es kaum etwas, was sie nicht können, denn ihr Aufbau ist jetzt Baustein für Baustein möglich, mit mikrometerkleinen 3D-Pixeln, also "Voxel für Voxel", wie die Forscher am Max-Planck-Institut für Intelligente Systeme (MPI IS) sagen.
Der Begriff Voxel bezeichnet in Computerspielen Gitterpunkte im 3D-Raster. Die Forscher bauen also ihre Maschinen ähnlich wie in Minecraft aus Kleinstmodulen zusammen und erschaffen damit immer neue Formen und Funktionen.
Baukastensystem
Die Gruppe "Physische Intelligenz" um Professor Dr. Metin Sitti arbeitet an magnetisch gesteuerten Robotern im Submillimeter-Maßstab. Ihr jüngster Durchbruch ist eine mechanische Plattform, in der sie Stück für Stück beliebige Roboterformen zusammensetzen. Dabei können sie unterschiedliche Materialien frei kombinieren. Dazu zählen zum einen weiche Basismaterialien als Stützstrukturen, Polymere oder Elastomere oder biokompatible, also etwa für den Einsatz in der Blutbahn besonders verträgliche Gelatine.
Zum anderen setzen die Forscher Materialien ein, in die magnetische Mikro- und Nanopartikel eingebettet sind. Diese Bausteine reagieren auf äußere Magnetfelder und bestimmen schließlich die Funktionen der Winzlinge. Mit Blick auf diese beiden Komponenten entstand die Bezeichnung Magnetic Soft Machines. Eine dritte Komponente sind Klebeflächen und Klebestreifen, die zum Beispiel unterschiedlich magnetisierte Voxel verbinden. Damit entstehen Komponenten, die sich magnetisch ausrichten und in wechselnden Magnetfeldern steuerbare Aktionen ausführen.

(Bild: MPI Intelligente Systeme)
Aus diesen Komponenten haben die Wissenschaftler bereits sehr unterschiedliche bewegliche Roboter mit individuellen Magnetisierungsprofilen zusammengesetzt. Die kleinsten davon maßen in der Länge nur 70 Mikrometer, also gerade einmal 0,07 Millimeter, wie Dr. Jiachen Zhang gegenüber c’t berichtet.
Vom Greifer bis zum Blasebalg
So entstand beispielsweise eine einfache Kapsel aus zwei unterschiedlich magnetisierten Halbschalen. Die eine Halbschale ist dotiert mit Kobalt-Teilchen, die andere mit Partikeln aus einer Neodym-Eisen-Bor-Legierung. Zunächst pressen sich die Halbschalen magnetisch aneinander und halten dicht. Durch ein äußeres Magnetfeld lässt sich dann aber eine Halbschale schneller ummagnetisieren als die andere. Die Kapsel springt auf und gibt ihre Ladung frei, und zwar genau im Einflussbereich des Magnetfeldes.

(Bild: MPI Intelligente Systeme)
Eine komplexer aufgebaute Minimaschine aus übereinanderliegenden Ringen ergab eine Kapsel mit einem Durchmesser von etwa 0,5 Millimeter. Im Magnetfeld aktiviert zog diese ihre bauchige Struktur zusammen und quetschte ihren Inhalt heraus. In Versuchen ließen die Forscher mehrere dieser Blasebalge in einem Magenmodell schwimmen. Einmal aktiviert gaben alle zugleich ihre flüssige Ladung in den Magen ab.
Videos by heise
Ungleich verteiltes Stützmaterial
Der Vorteil der Miniroboter ist, dass sie ohne eigene Energieversorgung und drahtlos arbeiten. Magnetfelder von außen steuern ihre Funktionen im Körper, je nach Feldstärke auf Distanzen zwischen einigen Millimetern und einigen Zentimetern. Manche Funktionen sind sogar variabel, abhängig von der Stärke des umgebenden Magnetfeldes.
Das gilt zum Beispiel für einen Greifer mit sechs Fingern, der an eine Blüte erinnert. Ohne Magnetfeld sind die Blütenblätter geschlossen. Bei einer geringen magnetischen Flussdichte öffnen sich zunächst drei der Greiffinger und im stärkeren Magnetfeld dann alle sechs. Diesen Effekt erreichten die Forscher durch eine ungleiche Verteilung der Stützmaterialien, drei der Greiffinger sind dadurch steifer und strecken sich später als die anderen drei.
(Bild: MPI Intelligente Systeme)
Zuvor hatten die Wissenschaftler mit Minirobotern aus nur einem magnetisierten Material experimentiert. Auch die bewegen sich im Magnetfeld, aber ihre Bewegungen lassen sich nur sehr eingeschränkt allein durch ihre Geometrie beeinflussen. Entscheidend besser manipulierbar sind die Winzlinge durch den jetzt verwendeten voxelweisen Aufbau aus verschiedenen Materialien. Dazu sind am Institut Schablonen und Gestelle entstanden, in denen die Laboranten unter dem Mikroskop ihre Roboterkonzepte montieren. Die dafür benutzten Voxel sind selbst im Labor Massenprodukte, die zu Tausenden in Blöcken mit Minigussformen entstehen.
Konstruiert und simuliert
Für die Konstruktion und Montage eines neuen Miniroboters benötigen die Wissenschaftler in der Regel zwischen einer Stunde und zehn Stunden. Sie verschaffen sich durch die Simulation innerhalb der Software Abaqus von Dassault Systems einen ersten Eindruck von der Bewegung in magnetischen Feldern. Allerdings bräuchte die Software noch ein aufwendiges Feintuning, um die genauen Abläufe in wechselnden Magnetfeldern zu simulieren, wie Zhang verrät. Bisher haben die Forscher diesen Aufwand gescheut und optimieren ihre Miniroboter zunächst noch per Trial-and-Error.
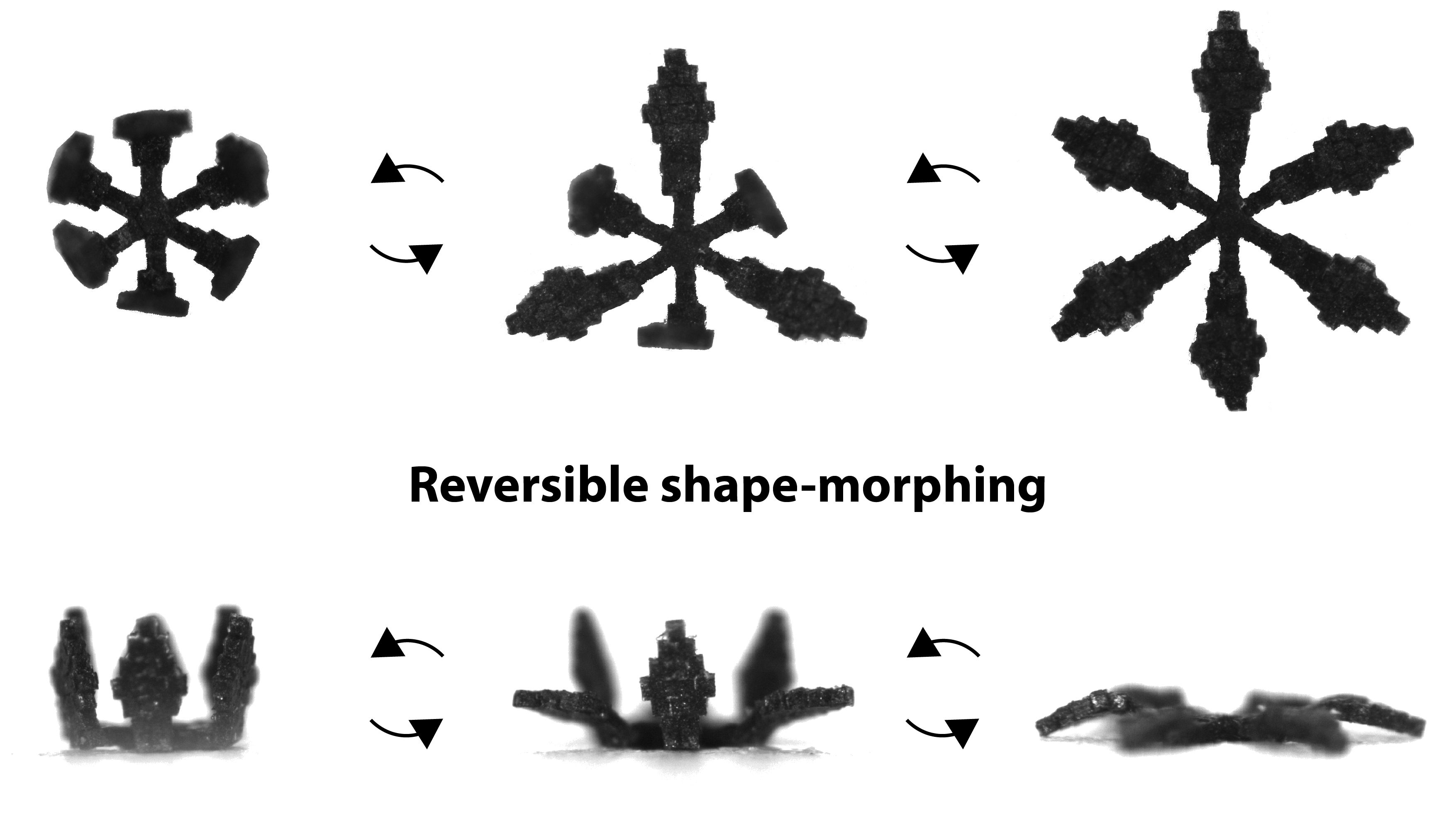
So ist zum Beispiel auch ein Roboter aus zwei kreisrunden Ringen mit insgesamt 16 Scharnieren entstanden. Im Magnetfeld verwandelt sich dieses runde Gebilde zu einem Stern mit vielen Ecken und Kanten. Mit einem solchen Verhalten könnte ein Miniroboter in der Blutbahn zunächst leicht mit der Strömung treiben und sich dann aber an einer gewünschten Stelle festsetzen. Vergleichbare Bots könnten ein Partikel transportieren und plötzlich abgeben, oder umgekehrt eine Öffnung vergrößern und versuchen, Partikel einzufangen.

(Bild: MPI Intelligente Systeme)
Tatsächlich haben die Forscher sogar einen zylindrischen Roboter gezeigt, der im aktivierten Zustand seinen Durchmesser deutlich verkleinert. Dieser konnte mit dem Medium in einer Leitung strömen, sich aber magnetisch getriggert an einer Stelle wieder ausdehnen und festsetzen, ohne dabei die Leitung für die durchströmende Flüssigkeit zu verstopfen. In Verbindung mit einem Kapsel-Roboter an einem Nylonfaden schleppte der Ankerroboter einen Wirkstoff an sein Ziel. Die Kapsel ließ sich aufgrund ihres Abstands gezielt und unabhängig von der Aktivierung des ersten Roboters magnetisch auslösen.
In einer weiteren Anwendung gelang es, 3D-gedruckte Käfige mit Stammzellkulturen zu besiedeln und diese mit dem Ankerroboter zu transportieren. Sogenannte mesenchymale Stammzellen können sich vielfältig differenzieren und zum Beispiel die Regeneration unterschiedlicher Stütz- und Bindegewebe wie Knochen oder Muskeln unterstützen. Sie können zudem bei der Bildung von Blut und Knochenmark helfen. Auch mit dieser Fracht gelang das Festsetzen in einer durchströmten Leitung.
Schlauchroboter pumpt
Ein wahrer Riese unter den Minirobotern ist die Peristaltikpumpe aus dem MPI IS. Sie ist etwa vier Millimeter lang und hat einen Öffnungsradius von einem Millimeter. Diese Röhre ist aus etwa drei Dutzend Einzelringen zusammengesetzt, deren magnetische Voxel von Ring zu Ring um 10 Grad verdreht ausgerichtet sind. In einem rotierenden Magnetfeld würgte dieser Pumpschlauch sowohl Flüssigkeiten als auch Styroporkugeln mit einem Millimeter Durchmesser hervor.
Bislang erfordern die Miniroboter am Institut mühevolle Kleinarbeit und sie lassen sich dadurch nur in kleinen Stückzahlen herstellen. Die Forscher haben zahlreiche Gestaltungsideen und probieren noch viel aus. Für die Zukunft steht allerdings die Automation des Produktionsprozesses ganz oben auf ihrer To-do-Liste. Wenn erst einmal Miniroboter für typische Einsatzzwecke optimiert worden sind, lohnt sich auch der Aufbau einer Massenproduktion. "Das Pick-and-Place der Voxels und der Aufbau von dreidimensionalen Roboterkonstruktionen wird eine Herausforderung", schätzt Zhang. Das Team denkt über Mikromanipulatoren nach, zunächst sollen menschliche Teleoperatoren diese steuern. Später könnte die Steuerung der Manipulatoren die typischen Handgriffe erlernen und künstlich intelligent einsetzen.
Mit jedem gelungenen Automatisierungsschritt rücken dann aber ganze Miniroboter-Armeen näher. Als Einsatzort bietet sich in erster Linie die Biomedizintechnik an. Minimalinvasiv lassen sich die Miniroboter in den menschlichen Körper einschleusen, um dort zielgenau Wirkstoffe einzubringen, Proben zu nehmen oder mikrochirurgisch einzugreifen. Da sich die Magnetic Soft Machines außerhalb der steuernden Magnetfelder nicht aktivieren, bleiben unerwünschte Nebeneffekte gering.

In Ausgabe 15/2021 haben wir Chromebooks getestet und deren Betriebssystem Chrome OS auf den Zahn gefühlt, das längst mehr als nur ein Browser ist. Außerdem zeigen wir, wie Sie Ihr Homeoffice kostengünstig und umfassend aufrüsten können – vom PC über die Peripheriegeräte bis zum Netzwerk. Zum Homeoffice passende Mobilfunktarife, die 15 GByte oder mehr bieten, hat c’t-Redakteur Urs Mansmann getestet. Außerdem erklären wir das Kryptografie-Lerntool CrypTool 2, haben Premium-Notebooks getestet und uns ESPHome angesehen, eine Low-Code-Lösung für Smart-Home-Projekte. Ausgabe 15/2021 finden Sie ab dem 2. Juli im Heise-Shop und am gut sortierten Zeitschriftenkiosk.
(agr)
