

Assistenzroboter zum Füttern kann mit fast jeder Mahlzeit umgehen
Einige Pflegebedürftige müssen gefüttert werden. Assistenzroboter können Pflegepersonal dabei unter die Arme greifen. Doch das ist nicht so einfach.
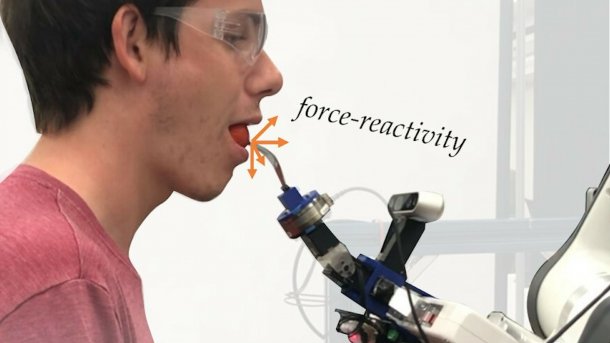
(Bild: Stanford University)
Einem Forschungsteam des ILIAD Labs der Stanford University ist es gelungen, einen Roboter zu entwickeln, der Menschen mit Rückenmarksverletzungen oder anderen motorischen Beeinträchtigungen füttern kann. Der Roboter ist dabei in der Lage, nahezu jegliches Essen aufzunehmen und in den Mund des Pflegebedürftigen einzuführen.
Herkömmliche Roboter zum Füttern pflegebedürftiger Menschen müssen erst speziell auf das jeweilige Essen eingestellt werden, damit es mit einer Gabel oder einem Löffel aufgenommen werden kann. Auch sind diese Roboter limitiert, wenn es darum geht, das Essen direkt in den Mund zu schieben. Die Bewegungen sind häufig einfach nur programmiert. Meist stoppt die Gabel vor dem Mund und die Person muss das Essen selbst aufnehmen, was einigen Pflegebedürftigen nicht möglich ist.
Hier setzt der Roboter der Stanford University an. Er soll die Nahrungsaufnahme angenehmer gestalten, zugleich das Pflegepersonal entlasten und deren Burnout-Risiko minimieren. Dazu hat das Forschungsteam mehrere Roboteralgorithmen entwickelt, mit denen der Fütterungsprozess für viele Nahrungsmittel autonom und bequem erfolgen kann.
Wie aus der noch im Review befindlichen Studie "Learning Visuo-Haptic Skewering Strategies for Robot-Assisted Feeding" hervorgeht, kombinieren die Forschenden bei dem Roboter Computervision und Kraftsensoren, um mit nahezu jedem Lebensmittel umgehen zu können. Dabei nutzt der Roboter drei Roboterarme. Der erste benutzt eine Gabel, um das Lebensmittel aufzunehmen. Der zweite Roboterarm schiebt es auf einen Löffel eines dritten Roboterarmes. Der führt ihn dann zum Mund des Pflegebedürftigen und führt das Essen dann mit einer als angenehm empfundenen Geschwindigkeit unter optimiertem Winkel ein.
Aufspießtechniken
Um mit möglichst vielen Lebensmitteln, die gleich aussehen, aber eine unterschiedliche Konsistenz haben, umgehen zu können, setzen die Wissenschaftler eine Kamera sowie einen Kraftsensor für ein haptisches Feedback ein. Mit verschiedenen Nahrungsmitteln, die ein unterschiedliches Verhalten beim Aufspießen an den Tag legen, trainierten sie den Roboter. Über das visuelle System wird zunächst das Lebensmittel anvisiert und die Gabel in einem optimalen Winkel in Kontakt gebracht. Die Gabel tastet dann das Lebensmittel auf dessen Konsistenz hin ab, um so zu ermitteln, wie weich oder fest es ist. Je nach Robustheit wählt der Roboter dann eine von zwei Aufspießtechniken aus: eine schnelle, vertikale Bewegung für feste Lebensmittel, eine sanfte, schräge Bewegung für zerbrechlichere Lebensmittel. Prinzipiell verhält sich der Roboter dabei wie ein Mensch, der sich das Essen ansieht und in ihm herumstochert, bevor er es mit der Gabel aufspießt.
Videos by heise
Auf diese Weise konnte der Roboter eine hohe Anzahl an Lebensmitteln verlässlich aufnehmen. Dünne Lebensmittel wie Zuckerschoten oder Salatblätter seien jedoch eine Herausforderung, sagt Priya Sundaresan, eine der Mitautorinnen der Studie.
Um ein Lebensmittel besser aufnehmen zu können, verwenden die Forschenden einen zweiten Roboterarm, der einen gebogenen Stößel hält, um es auf einen Löffel zu schieben. Ein Computer-Vision-System hilft bei der Analyse, wann ein Lebensmittel zu zerbrechen droht, sodass das Besteck dann aufhört, sich aufeinander zuzubewegen und stattdessen eine schaufelartige Bewegung vornimmt.
Mit richtiger Kraft und Bewegung
Ist das Essen auf dem Löffel, wird es an den Mund herangeführt. Dazu haben die Stanford-Wissenschaftler dem Roboterarm eine Art mechanisches Handgelenk spendiert, um den Löffel mit optimalem Winkel in den geöffneten Mund einführen zu können. Ein Computer-Vision-System ermittelt dazu, wann der Mund geöffnet ist. Über einen Kraftsensor wird festgestellt, wann der Löffel die Lippen oder die Zunge berührt und stoppen muss. Er registriert auch, wann der Pflegebedürftige einen Bissen genommen hat und zieht den Löffel dann wieder mit angepasster Kraft zurück.

Der Fütterroboter ist zwar schon weit fortgeschritten, arbeitet allerdings noch nicht perfekt. So kann er noch nicht alle Lebensmittel aufnehmen. Auch ist das mundgerechte Zerschneiden großer Lebensmittel bisher noch nicht vorgesehen. Ein weiterer Ansatz ist, dass der Mensch mit dem Roboter kommunizieren können sollte. So kann die pflegebedürftige Person dem Roboter etwa mitteilen, was er als Nächstes essen möchte. Daran arbeiten die Forschenden nun weiter.


(olb)