

Machine Learning: Roboter schält Banane durch Nachahmung zerstörungsfrei ab
Ein Roboter, der eine Banane schält, hört sich nicht komplex an. Dazu muss der Roboter aber wissen, was er tut.
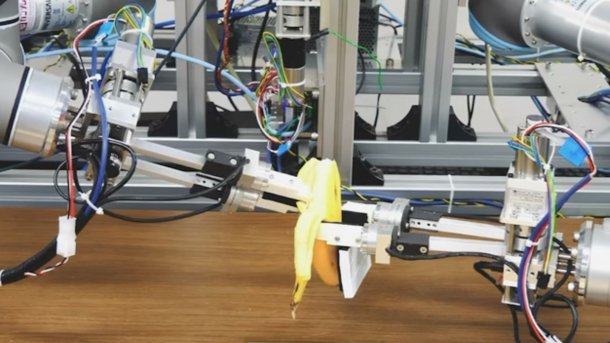
(Bild: Heecheol Kim, University of Tokyo (Screenshot))
Während es einem Affen oft besser gelingt, eine Banane abzuschälen als dem Menschen, sind Roboter bei dieser Aufgabe noch weiter hintendran. Ihnen fehlt es an der notwendigen Feinmotorik und Geschicklichkeit, dem sprichwörtlichen Fingerspitzengefühl, um eine harte Bananenschale zu entfernen, ohne dabei das weiche Innere der Banane zu zermantschen. Ein Forschungsteam der University of Tokyo unter der Leitung von Heecheol Kim hat nun einem zweiarmigen Roboter, der lediglich über Greifer mit je zwei Fingern verfügt, durch Maschinelles Lernen beigebracht, wie er eine Banane schälen kann, ohne sie zu beschädigen.
Das Team von Kim fütterte dem Paper "Robot peels banana with goal-conditioned dual-action deep imitation learning" nach ein "Dual-Action Deep Imitation Learning"-Modell (DIL) mit rund 811 Minuten visueller Trainingsdaten. Ein vergleichsweise datensparsamer Ansatz, der auch weniger Rechenzeit und Ressourcen benötigt. Ein Mensch schälte zum Erstellen der Trainingsdaten mehrere Hundert Bananen. Dabei wurde der gesamte Prozess des Schälens in neun Stufen abgebildet, darunter das Greifen der Banane, das Aufheben vom Tisch mit einer Hand sowie dem Ergreifen der Spitze der Banane, um sie zu öffnen und schließlich rundherum abzuschälen.
Videos by heise
Dazu gehört auch das sorgfältige Handling der Banane, wie die Wissenschaftler ausführen. Die Herausforderung besteht darin, mit den Früchten trotz ihrer Abweichungen in Form und Größe präzise umgehen zu können. Bei Bewegungen, die die Banane vermutlich nicht zerstören, setzen die Forscher auf Nachahmung dessen, was ein Mensch ohne nachzudenken beim Schälen einer Banane umsetzt. Sobald es darum ging, die Banane präzise bewegen zu müssen, benutzt das System einen reaktiven Ansatz, um so etwa auf die spezifischen Eigenschaften der Frucht und auf unerwartete Änderungen der Umgebung eingehen zu können.
Verbesserungsbedarf
Ganz so gut klappt das aber noch nicht. Nach Angaben von Kim gelang es dem Roboter lediglich in 57 Prozent der Fälle, die Banane zerstörungsfrei von ihrer Schale zu befreien. Dafür benötigte der Roboter in der Regel jeweils etwas weniger als drei Minuten. Unklar ist noch, wie der Roboter mit Früchten umgeht, die stärkere Abweichungen in Größe und Form haben. Hier müsste dann gegebenenfalls zusätzlich bei der Präzision der Motoransteuerung nachgebessert werden.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes Video (TargetVideo GmbH) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (TargetVideo GmbH) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Das entwickelte Modell soll aber nicht nur zum Schälen von Bananen verwendet werden. Die Forscher wollen das System mit weiteren Daten antrainieren, damit Roboter weitere allgemeine Aufgaben übernehmen können, für die eine gewisse Feinmotorik benötigt wird.



(olb)