

Robotikwettbewerb MBZIRC: Landeanflüge und der Griff zum Schraubenschlüssel
Der Roboterwettbewerb in Abu Dhabi nimmt Fahrt auf: Drohnenlandungen auf einem fahrenden Fahrzeug und Bodenroboter bei der Werkzeugwahl standen auf dem Programm.
(Bild: Hans-Arthur Marsiske)
Die ersten, die am Donnerstag beim Roboterwettbewerb MBZIRC (Mohamed Bin Zayed International Robotics Challenge) in Abu Dhabi jubelten, waren die Mitglieder des Teams der italienischen University of Catania, deren Drohne eine sichere Landung auf dem fahrenden Fahrzeug gelang – und das auch noch während der ersten acht Minuten, in denen das Fahrzeug mit 15 km/h noch relativ schnell fährt. Hierfür beobachtete der Flugroboter zunächst eine Weile das Geschehen und begann dann dem Fahrzeug zu folgen, während er langsam die Höhe verringerte.
Das nächste Team (University of Seville) folgte einer anderen Strategie: Die Drohne schwebte die meiste Zeit über dem Zentrum des Feldes und wartete, bis das Fahrzeug unter ihr auftauchte, um schließlich, als es auf dem in Form der Ziffer 8 gestalteten Kurs auf einen geraden Abschnitt einschwenkte, zur Landung anzusetzen. Auch das gelang.
Drohnenchallenge in Abu Dhabi (5 Bilder)

Bislang ist es nur vier Teams gelungen, einen Flugroboter sicher auf dem fahrenden Fahrzeug zu landen: University of Catania, Team Al-Robotics aus Sevilla, einem Team mit dem unaussprechlichen Namen „CTU Prague-Upenn-UoL“ (Czech Technical University/University of Pennsylvania/University of Lincoln) – und schließlich auch NimbRo. Die Bonner brauchten vom Start der Drohne bis zur Landung auf dem Dach des Fahrzeugs nur wenige Sekunden. In einem eleganten Bogen hob der Flugroboter von seinem Startpunkt ab, erkannte das Fahrzeug, folgte ihm sogleich, während es gleichzeitig die Höhe verringerte und setzte sicher auf. Nur weil vorher ein Reset nötig war, liegt die gewertete Zeit etwas über einer Minute, aber deutlich unter den 2:17 Minuten des zuvor führenden Teams von der University of Catania – und das, obwohl der Wind mittlerweile deutlich aufgefrischt hatte.
Werkzeug greifen will gelernt sein
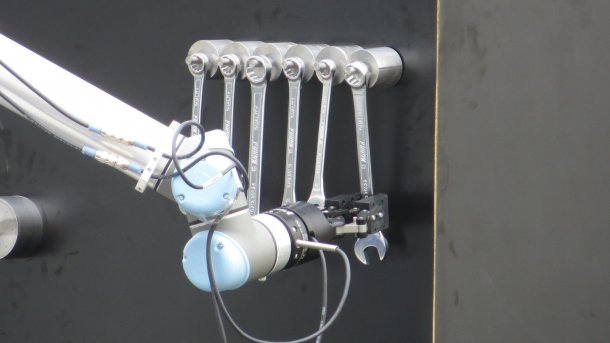
Die Bodenroboter taten sich dagegen zunächst etwas schwerer. Der Roboter der Scuola Superiore Sant‘Anna steuerte zunächst etwas verhalten auf das Armaturenbrett zu und positionierte sich vor den dort hängenden Schraubenschlüsseln. Dann war für die nächsten zehn Minuten keine Bewegung mehr zu sehen. Der Roboter war jedoch nicht inaktiv, sondern erfasste mit dem Laserscanner die Werkzeuge. Schließlich griff er einen der Schlüssel, offensichtlich den richtigen, den es gelang ihm auch, das geschlossene Ende auf die Ventilschaft zu setzen. Doch dann passierte nichts mehr. Der Ventilschaft hätte jetzt einmal um die eigene Achse gedreht werden müssen, doch das Team brach schließlich den Versuch ab.
Team MASKOR von der FH Aachen erreichte das Ziel deutlich schneller, wusste damit aber nichts anzufangen. Der Roboterarm trat nicht in Aktion, mehrere Resets, die innerhalb der Laufzeit von 25 Minuten möglich sind, halfen auch nichts.
Die Bodenroboter und die Schraubenschlüssel (12 Bilder)

Team NimbRo (Universität Bonn) dagegen raste geradezu auf das Armaturenbrett zu. Stillstand schien für diesen Roboter ein Fremdwort zu sein: Auch beim Scannen der Werkzeuge war der Roboterarm ständig in Bewegung, griff sich einen Schraubenschlüssel – wirkte dann aber etwas unentschlossen, bewegte das Werkzeug ruckartig vom Ventil weg. Kurz entschlossen forderte das Team zwei Resets. Dann war der Roboter wieder am Armaturenbrett – zu einem Zeitpunkt, als das italienische Team diese Position überhaupt erstmals erreicht hatte, was das Tempo des Bonner Roboters recht gut illustriert. Im dritten Anlauf lief aber alles reibungslos. Der Roboter wählte den passenden Schraubenschlüssel aus, setzte ihn mit dem offenen Ende auf das Ventil, drehte es einmal um 360 Grad, setzte zurück, ließ den Schlüssel fallen und fuhr zum Startpunkt zurück. Das muss den Bonnern erstmal jemand nachmachen.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes YouTube-Video (Google Ireland Limited) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (Google Ireland Limited) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Vielleicht das Team von der Technical University of Denmark? Der mit Rädern für geländegängige Rollstühle ausgestattete Roboter fuhr schnell und zielstrebig zur Armaturentafel. Dort orientierte er sich mit Tastsinn. Mithilfe von Kraftsensoren im Arm könne er die Länge der Schraubenschlüssel mit einer Genauigkeit im Submillimeterbereich feststellen, sagte ein Teammitglied. Tatsächlich griff der Roboter den richtigen Schlüssel, setzte ihn auf die Ventilschraube und drehte sie einmal herum. Insgesamt brauchte er dafür ungefähr drei Minuten länger als der Roboter von NimbRo. Das ist bei dieser Aufgabe nicht viel und könnte morgen beim zweiten Versuch noch unterboten werden. Die Dänen muss man auf jeden Fall im Auge behalten. (axk)
