

Softroboter-Regenwurm soll Untergrund erkunden – und Leben retten
Mit fluiden Aktuatoren bilden Wissenschaftler die Segmente eines Regenwurms künstlich nach und bringen damit einen Softroboter zum Kriechen.
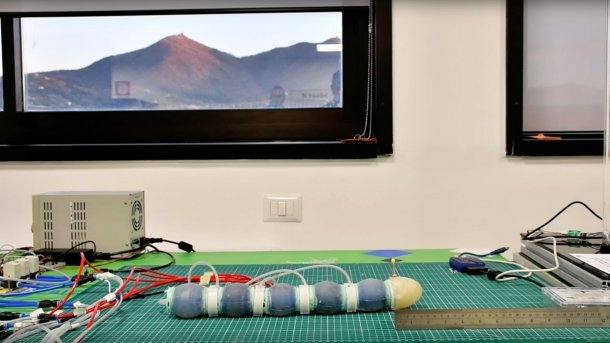
(Bild: Istituto Italiano di Tecnologia)
In der Natur gibt es viele unterschiedliche Fortbewegungsarten, eine davon ist das Kriechen von Regenwürmern, die sich durch Kontraktionen fortbewegen und ins Erdreich bohren können. Ein Forschungsteam des italienischen Istituto Italiano di Tecnologia (IIT) in Genua hat sich davon inspirieren lassen und einen Softroboter entwickelt, der weiche Aktuatoren besitzt, die sich strecken und zusammenziehen, wodurch sich der Roboter vorwärtsbewegt.
Am Anfang der Entwicklung des Roboter-Regenwurms haben sich die Wissenschaftlerinnen und Wissenschaftler mit der Frage beschäftigt, wie eigentlich die Fortbewegung eines Regenwurms funktioniert und wie dessen Fortbewegungsmechanik aussieht. Regenwürmer benutzen abwechselnde Kontraktionen von Muskelschichten, um sich durch die Erzeugung retrograder peristaltischer Wellen fortzubewegen. Das klappt sowohl über als auch unter der Erde.
In den einzelnen Körpersegmenten (Metamere) des Regenwurms befindet sich eine bestimmte Flüssigkeitsmenge. Sie steuert den Innendruck, der nötig ist, um Kräfte ausüben zu können. So kann der Regenwurm unabhängig von den anderen Metameren lokale unterschiedliche Bewegungsmuster durchführen.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes Video (TargetVideo GmbH) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (TargetVideo GmbH) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Die Forschenden des IIT haben daraus einen weichen Aktuator entwickelt und fünf davon zu einem 45 cm langen und 605 g schweren Roboterregenwurm miteinander verbunden, wie sie in der Studie "An earthworm-like modular soft robot for locomotion in multi-terrain environments" beschreiben, die in Scientific Reports veröffentlicht ist. In der Natur haben Regenwürmer zwischen 60 und 180 Segmente.
Bio-inspirierte Aktuatoren
Die peristaltisch weichen Aktuatoren (Peristaltic Soft Actuator – PSA) bestehen aus einer elastomeren Haut, die jeweils eine gewisse Flüssigkeitsmenge einschließt. Damit ahmen die Wissenschaftler das konstante Volumen der Coleomflüssigkeit des Regenwurms nach. Aus einer neutralen Position heraus wird nun Luft hineingepumpt und der Aktuator dehnt sich aus. Wird dagegen Luft entzogen, zieht er sich zusammen. Durch die enthaltene Flüssigkeit wird das Segment in Längsrichtung kürzer, in Umfangsrichtung breiter. Dadurch entstehen radiale Kräfte. Antagonistisch dazu wird das Segment entlang der von vorne nach hinten verlaufenden Achse länger und in Umfangsrichtung dünner, wenn sich die Umfangsmuskeln zusammenziehen. Das führt zu Penetrationskräften entlang dieser Achse.
Die einzelnen Aktuatoren können sich bei einem Bar Überdruck um 10,97 mm ausdehnen. Bei einem Unterdruck von 0,5 Bar liegt die maximale Kompression bei 11,13 mm, schreiben die Forscher. Mit einem einzigen Aktuatormodul ist es so möglich, sowohl Längs- als auch Radialkräfte zu erzeugen.
Videos by heise
Die einzelnen Aktuatoren werden so angesteuert, dass eine Vorwärtsbewegung entsteht. Damit der künstliche Regenwurm nicht rutscht, haben die Wissenschaftler auf dessen Unterseite kleine passive Reibungskissen angebracht. Sie sind den Seten des Regenwurms nachempfunden, mit denen er sich abstützt und ein Zurückrutschen verhindert. Besonders schnell bewegt sich der Roboter allerdings nicht vorwärts: 1,35 mm/s legt er zurück.
Der Softroboter-Regenwurm befindet sich noch in einer ersten Ausbaustufe. Die nötige Pumpe und die Stromversorgung sind noch extern untergebracht. Der Roboter zeigt aber bereits jetzt, was mit alternativen Fortbewegungsarten möglich ist. Entsprechend können sich die Wissenschaftlerinnen und Wissenschaftler einen breiten Anwendungsbereich vorstellen: Sie sehen ihn bei Erkundungen im Untergrund, archäologischen Ausgrabungen sowie unterirdischen Such- und Rettungsaktionen und der Erkundung von Planeten.



(olb)