

Taktiler Robotersensor ertastet Größe von Objekten
Roboter durch Ertasten die Größe von Objekten bestimmen zu lassen, ist mit hohem Aufwand verbunden. Mit einem System aus Lichtleitfasern geht das einfacher.
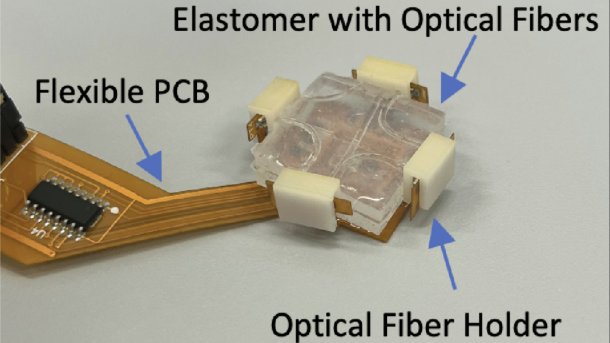
(Bild: Wentao Chen u. a.)
Ein Forscherteam der University of Hongkong hat einen weichen Tastsensor entwickelt, der es Robotern ermöglichen soll, Gegenstände zu ertasten, um sie besser ergreifen zu können. Er ist einfacher herzustellen und benötigt kein spezielles Training.
Der von den Wissenschaftlern in dem Paper "Polymer-Based Self-Calibrated Optical Fiber Tactile Sensor" auf Arxiv vorab vorgestellte weiche Sensor besteht aus zwei Schichten gewebter optischer Fasern, die von einem weichen Elastomer umgeben sind und umfasst einen Selbstkalibrierungsalgorithmus.
Der taktile Sensor erzeugt eine anisotrope Reaktion, sobald er verformt wird. Das kann in beliebigen Richtungen geschehen. Die Reaktion wird von einem linearen Kalibrierungsalgorithmus verarbeitet. Er ordnet die von den optischen Fasern ausgesendeten Signale der Größe eines Objektes zu, das den Sensor berührt. Der Sensor arbeitet dabei nach dem Prinzip, dass die Kontaktkraft aus dem Lichtleistungsverlust im weichen optischen Faserkern abgeleitet werden kann. Normal- und Scherkräfte werden dabei entkoppelt.
Genaues Ertasten
Den Sensor haben die Forschenden an einem Roboterarm montiert und verschiedenen Praxistests unterzogen. Dabei zeigte sich eine hohe Genauigkeit: Normalkräfte konnten mit einer durchschnittlichen Genauigkeit von 0,15 N (Newton), Scherkräfte in der X-Achse von 0,17 N und in der Y-Achse von 0,18 N aufgenommen werden. In allen Richtungen lagen die Werte zwischen 0 und 2 N. Damit ist es möglich, Objektgrößen mit einer durchschnittlichen Genauigkeit von 0,4 mm zu bestimmen, schreiben die Forscher.
Videos by heise
"Die Ergebnisse unterstreichen die genaue Messung, die durch das Hardware-Design der anisotropen zweischichtigen optischen Faserstruktur und der flexiblen Leiterplatte sowie den Kalibrierungsalgorithmus ermöglicht wird", erklären Wentao Chen und Youcan Yan, zwei an der Studie beteiligte Wissenschaftler.
Der taktile Sensor weise gegenüber herkömmlichen künstlichen taktilen Systemen, die sich auf datengesteuerten Modellen künstlicher Intelligenz (KI) stützen und entsprechend trainiert werden müssen, einige Vorteile auf. Das System bedarf keines rechenintensiven Trainings und der Sensor lasse sich einfach und zu geringen Kosten herstellen.

Die Forscher planen nun, ihre Tests zu intensivieren und den Sensor in verschiedene Roboter zu implementieren und anzuwenden. Zudem wollen sie weitere optische Faserschichten in das System integrieren und gegebenenfalls deren Anordnung ändern. Die Forscher beabsichtigen damit, möglicherweise zusätzliche taktile Informationen zu erhalten.


(olb)