

Taktiler Sensor ermöglicht Roboter Umgang mit Textilien
Mit einer Kombination aus "fühlendem" ReSkin-Sensor und Machine Learning können Roboter einzelne Stofflagen greifen.
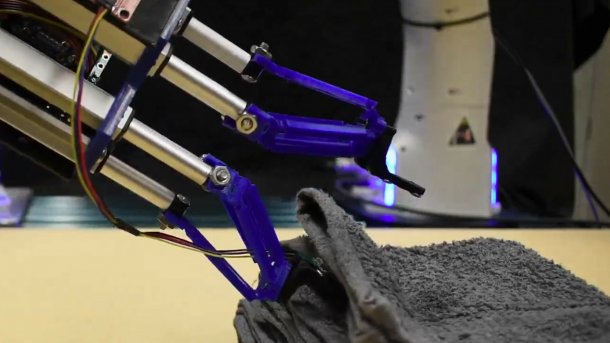
(Bild: Robotics Institute of Carnegie Mellon University (Screenshot))
Der Umgang mit textilen Stoffen ist für Roboter eine große Herausforderung, können dünne Textilien durch ihre Beschaffenheit doch chaotische Formen annehmen. Ein Team von Wissenschaftlerinnen und Wissenschaftlern des Robotik-Instituts der Carnegie Mellon University (CMU) im US-Bundesstaat Pennsylvania haben nun einen taktilen Sensor mit dem Namen ReSkin und einen Algorithmus für maschinelles Lernen so miteinander kombiniert, dass er Stofflagen "erfühlen" und einzelne davon ohne optische Wahrnehmung gezielt aufnehmen kann.
Die meisten wissenschaftlichen Arbeiten, die sich mit der Manipulation textiler Stoffe durch Roboter beschäftigen, setzten auf Bildsensoren wie etwa Kameras oder Imager. Diese visuellen Daten zu interpretieren, gelingt unterschiedlich gut. Bei einfacher Handhabung eines Stückes funktionieren sie, bei komplexeren Aufgaben weniger gut.
Greifen mit Gefühl
"Als wir mit diesem Projekt begannen, wussten wir, dass es in letzter Zeit viele Arbeiten über die Handhabung von Stoffen durch Roboter gegeben hatte, aber die meisten dieser Arbeiten betrafen die Handhabung eines einzelnen Stücks Stoff. Unsere Arbeit befasst sich mit der relativ wenig erforschten Richtung des Erlernens der Manipulation eines Stoffstapels durch taktile Wahrnehmung", sagt Daniel Seita, einer der Forscher und Mitautor des Papers "Learning to Singulate Layers of Cloth using Tactile Feedback", der auf Arxiv veröffentlicht wurde. Darin beschreiben die Wissenschaftlerinnen und Wissenschaftler ihren taktilen Ansatz.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes Video (TargetVideo GmbH) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (TargetVideo GmbH) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Dabei benutzen sie einen Franka-Roboterarm, der mit einem Mini-Delta-Greifer ausgestattet ist. In einem Finger des Greifers hat das Forscherteam einen ReSkin-Sensor eingebaut. Der taktile Sensor wurde an der CMU entwickelt und misst auftretenden Druck anhand der magnetischen Flussdichte durch eine Kombination aus einem magnetischen Polymer und einem Magnetometer. Mit dem Sensor und einem angepassten Algorithmus für maschinelles Lernen gelingt es den Forschern, die Höhe des Greifers so einzustellen, dass er eine oder zwei Lagen an Stoff gezielt von einem Stapel greifen kann.
In 180 Versuchen evaluierte das Team das Greifen von Stofflagen. Dabei schnitt das System nach Angaben der Wissenschaftlerinnen und Wissenschaftler besser ab als optische Ansätze.
Videos by heise
"Im Vergleich zu früheren Ansätzen, die nur Kameras verwenden, wird unser auf Tastsinn basierender Ansatz nicht durch Muster auf dem Stoff, Änderungen der Beleuchtung und andere visuelle Diskrepanzen beeinträchtigt", sagte Sashank Tirumala, einer der beteiligten Wissenschaftler. Die Auflösung des ReSkin-Sensors ist fein genug, um einen oder zwei Stofflagen gezielt aufnehmen zu können.
Ihre Technik wollen die Forscherinnen und Forscher nun weiter verbessern. Zunächst wollen sie dem Roboter beibringen, mit komplexeren Textilien, mehreren und unterschiedlichen Stoffstücken, darunter auch Kleider, umzugehen. In einem weiteren Schritt wollen sie die taktile Erfassung mit einer optischen Erfassung kombinieren, um noch bessere Ergebnisse zu erzielen. Die Technik könnte dann in der Produktion, Wäschereien und in Haushaltsrobotern eingesetzt werden.



(olb)