

Neues Greiferdesign: Zarte Roboterblüte mit erstaunlicher Kraft
Der Greifer des Roboters sieht aus wie die zarte Blüte einer Blume. Doch der kann erstaunlich fest zupacken.
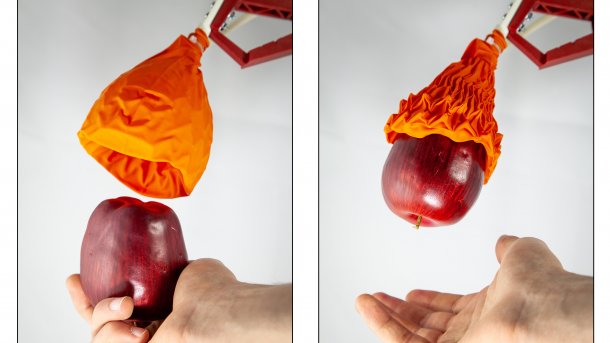
(Bild: MIT CSAIL)
Ein am Massachusetts Institute of Technology entwickelter Greifer eines Roboters kann mehr als das Hundertfache des eigenen Gewichts halten, sich dabei aber auch geschmeidig an unterschiedliche Formen anpassen. In einem vorab veröffentlichten Beitrag zur Robotikkonferenz ICRA beschreibt das Forschungsteam um Shuguang Li das Verfahren, das an frühere Ansätze zu weichen Greifern anknüpft.
Präzise und sanft
Die in der Industrierobotik verbreiteten harten Greifwerkzeuge mit zwei, drei oder mehr Fingern haben den Nachteil, dass ein hoher Regelungsaufwand nötig ist, um Gegenstände mit verschiedenen Formen und Materialeigenschaften zu fassen. Entweder müssen die Daten vorab einprogrammiert werden oder es sind präzise visuelle Kontrolle und Kraftrückkopplung erforderlich, damit etwa Glühbirnen oder rohe Eier nicht zerbrochen werden. Weiche Greifer dagegen können selbst empfindliche Objekte so sanft einhüllen, dass nichts kaputt geht.
Für einige Aufmerksamkeit sorgte vor einigen Jahren etwa der "Pulvergreifer", der den von vakuumverpacktem Kaffeepulver bekannten Effekt nutzt, dass es sehr hart ist, solange das Vakuum besteht, aber sofort weich und nachgiebig wird, sobald Luft in die Packung strömt. Die Forscher hatten diesen Vorgang damals umgekehrt: Ein Beutel mit weichem Pulver legte sich um den zu greifenden Gegenstand, dann wurde die Luft abgesaugt und der nun wieder harte Beutel hatte das Objekt, das beliebig geformt sein konnte, sicher im Griff.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes YouTube-Video (Google Ireland Limited) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (Google Ireland Limited) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Verschiedenste Gegenstände anheben
Statt des Pulvers hat das MIT-Team jetzt ein Skelett nach Art des Origami Magic Balls aus Silikonkautschuk gefertigt und mit einer luftdichten Membran umhüllt. Das Skelett ist nachgiebig, passt sich der Form des Objekts an und zieht sich zusammen, sobald die Luft aus der Membran gesaugt wird. In einem Video ist zu sehen, wie unterschiedliche Gegenstände sicher angehoben und auch wieder abgesetzt werden.
Nachdem sich die grundsätzliche Tauglichkeit des Ansatzes damit bestätigt hat, wollen die Forscher zukünftig mit anderen Materialien und Origami-Architekturen experimentieren. Außerdem soll Kraftrückkopplung eingesetzt werden, um das Verfahren weiter zu verbessern. (mho)
