

Robotik-Forschung: Marienkäfer als Vorbild für Robotergleiter
Koreanische Wissenschaftler haben sich die Flügelfalttechnik von Marienkäfern zum Vorbild genommen, um fliegende Roboter zu konstruieren.
Die Forscher orientieren sich an der Flügelfaltung von Marienkäfern
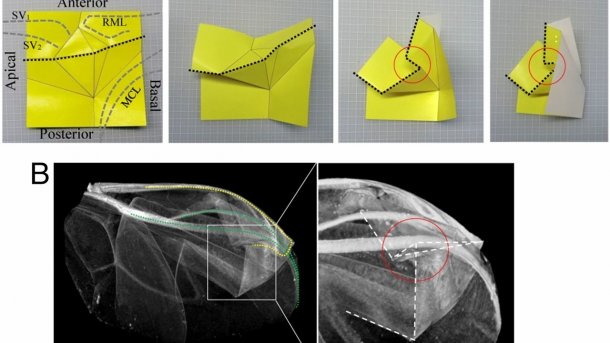
(Bild: Investigation of hindwing folding in ladybird beetles by artificial elytron transplantation and microcomputed tomography" , , , , und )
Marienkäfer sind Meister des Origami, der Kunst des Faltens: Unter ihrem gepunkteten Schutzpanzer sind zarte Flügel auf engstem Raum zusammengefaltet, die in kürzester Zeit entfaltet werden können, um nach der Landung wieder unter den Deckflügeln verstaut zu werden. Koreanische Wissenschaftler haben sich bei der Konstruktion eines Robotergleiters jetzt an diesem Prinzip orientiert.
Faltprozess dokumentiert
Die Forscher um Kyu-Jin Cho (Seoul National University), die jetzt in der Zeitschrift Science Robotics von ihren Experimenten berichten, stützen sich unter anderem auf eine drei Jahre alte japanische Studie. Die konnte mithilfe von Hochgeschwindigkeitskameras den Faltprozess erstmals genau dokumentieren und die zentrale Bedeutung der Venen in den Flügeln aufzeigen, die wie Spannfedern deren rasche Entfaltung ermöglichen.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes Video (TargetVideo GmbH) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (TargetVideo GmbH) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes Video (TargetVideo GmbH) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (TargetVideo GmbH) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Um diese Fähigkeit technisch nachzubilden, sind Cho und sein Forschungsteam vom Prinzip des Origami abgewichen, das die einzelnen Faltsegmente üblicherweise als starr betrachtet. Stattdessen wurde für die Flügel des Robotergleiters ein nachgiebiger Kunststoff verwendet. Einzelne Facetten sind im Ruhezustand gerundet, werden aber flach gedrückt, wenn die Flügel zusammengefaltet sind. Die dadurch gespeicherte Energie beschleunigt den Prozess der Entfaltung. Zugleich erlaube die gerundete Geometrie, dass die entfalteten Flügel von selbst einrasten, so die Forscher. Auf diese Weise könne der Robotergleiter innerhalb von 116 Millisekunden die Flügel ausbreiten, die das 150-fache ihres eigenen Gewichts tragen und starke aerodynamische Belastungen aushalten können.
Kriechen, Flügel entfalten
Der von den Koreanern konstruierte Gleiter hat eine Spannweite von 660 Millimetern. Die Flügel können auf ein Achtel ihrer Fläche zusammengefaltet werden. In diesem Zustand könne der Roboter sich kriechend fortbewegen, bei einem Sturz aber rasch die Flügel entfalten und sicher landen. Die Forscher haben das Verfahren auch mit aktiv angetriebenen Flügeln erprobt. Außerdem zeigte sich, dass die Energiespeicherung durch verformbare Origami-Facetten auch einem hüpfenden Roboter im Vergleich mit konventionellen Origami-Konstruktionen höhere Sprünge ermöglicht.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes Video (TargetVideo GmbH) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (TargetVideo GmbH) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Das Konzept sei ausbaufähig, meinen die Forscher. Zukünftig wollen sie neben den runden Elementen weitere Geometrien für die Origami-Facetten erkunden. Außerdem soll die Autonomie des Roboters erhöht werden, sodass dieser die Flugrichtung besser kontrollieren kann. (kbe)
