
Krabbeltier mit Python-Antrieb
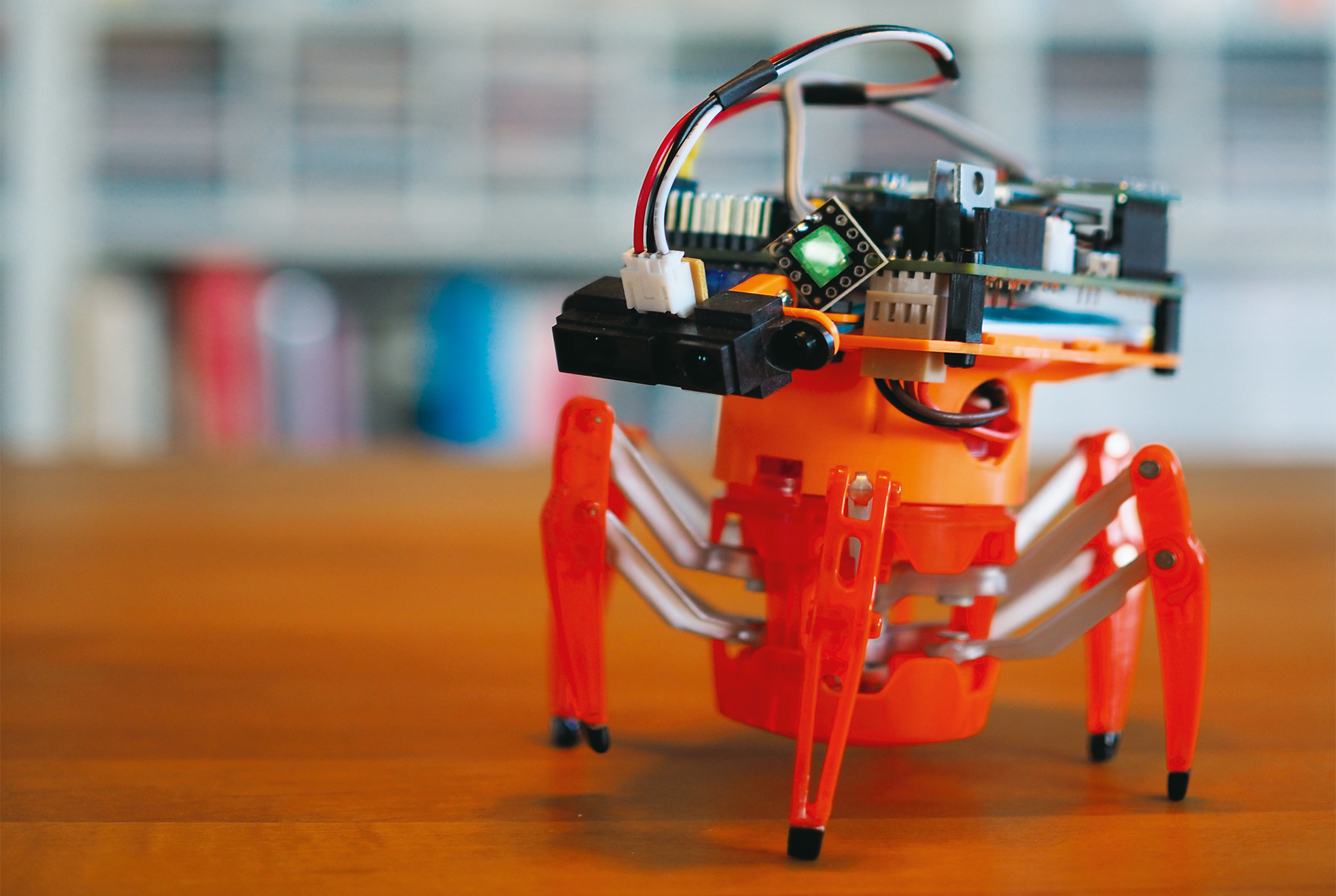
Aus der Roboterspinne von Hexbug wird mit Hilfe eines 3D-Druckers und einer selbstentworfenen Platine ein autonom arbeitender Laufroboter. Grundlage des Projekts ist das MicroPython-fähige HUZZAH32-Modul.
Die Skriptsprache Python ist heute nicht nur weit verbreitet, sondern insbesondere als Einstieg ins Programmieren sehr beliebt. Mit der Implementierung MicroPython lässt sie sich auf Mikrocontrollern einsetzen und ermöglicht damit einen einfachen Zugang auch zu umfangreicheren Projekten. Wie der praktische Einstieg in MicroPython gelingt, haben wir im vorigen Heft, in Make 2/19 ab Seite 104 beschrieben. Nun setzen wir MicroPython in einem komplexeren Projekt ein. Dieser Artikel beschreibt den Aufbau und die Programmierung eines einfachen autonomen Laufroboters, genannt Robotling.
Grundlage ist ein Spielzeugroboter von HexBug. Seit über 10 Jahren produziert die luxemburgische Firma verschiedene Roboter, von sehr einfachen, die bei einem Hindernis nur ihre Laufrichtung umkehren, bis zu fernsteuerbaren Kampfrobotern. Bei Letzteren fällt die HexBug-Spinne durch ihre elegante Laufmechanik mit nur zwei kleinen Gleichstrommotoren auf: Ein Motor treibt die Beine an und bewegt den Roboter vorwärts, während der zweite den „Kopf“ der Spinne dreht und damit die Laufrichtung bestimmt. Bei der simplen, aber effektiven Konstruktion lag die Idee nahe, die Spinne als günstige Basis für einen autonomen Laufroboter zu verwenden. Diese Idee gab es schon an anderer Stelle, etwa als Arduino-basierter Spiderino, wurde aber meines Wissens bisher nicht mit MicroPython umgesetzt.
