
Pfadplanung für Roboter
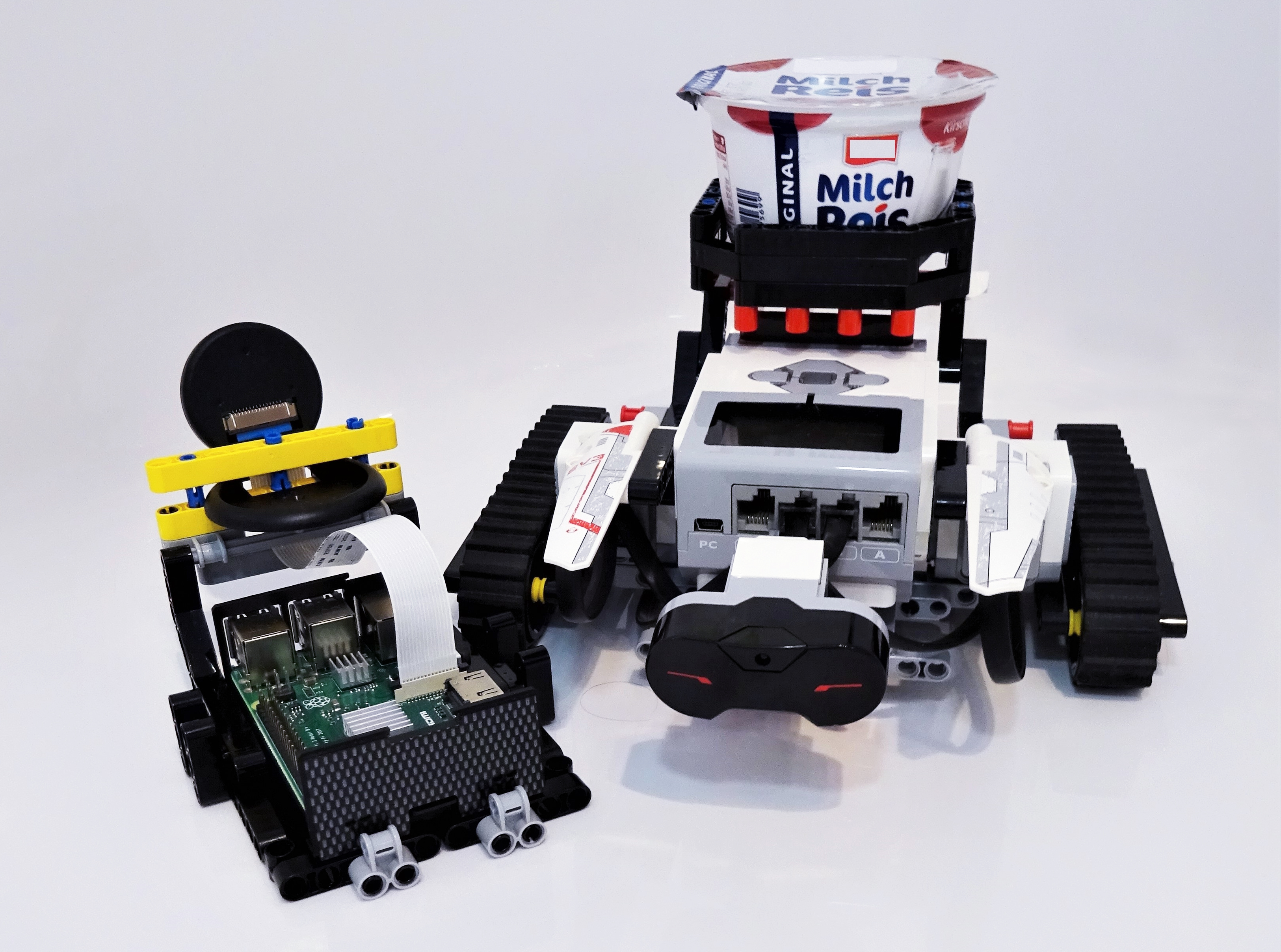
Autonome Roboter bewegen sich ohne menschliche Eingriffe durch Industriehallen auf der Erde und auf der Oberfläche entfernter Planeten. Ein Pfadplanungs-Algorithmus berechnet dabei den kürzesten Fahrweg zum gewünschten Ziel. Wir zeigen als Beispiel, wie ein Lego-EV3-Roboter so programmiert wird, dass er Milchreis auf einer Terrasse serviert. Wer keinen Roboter hat, kann mit unserer Simulationssoftware trotzdem eigene Experimente durchführen.

{kind=link}