

Forscher bauen Robotergreifer aus Langustenschwänzen
Biologische und synthetische Komponenten lassen sich kombinieren, um daraus einen Robotergreifer zu erstellen. Der kann sogar ordentlich Gewicht bewegen.
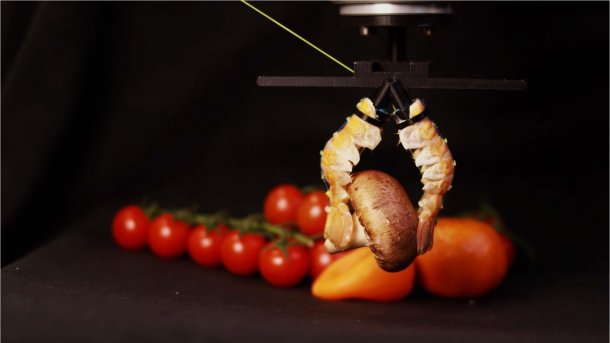
Mit Langustenschwänzen lassen sich Pilze greifen – oder auch Tomaten.
(Bild: Create Lab EPFL (CC BY SA))
Ein Wissenschaftsteam des Computational Robot Design and Fabrication Lab (Create Lab) der École Polytechnique Fédérale de Lausanne hat einen alternativen Weg für einen Robotergreifer eingeschlagen und biologische mit synthetischen Komponenten miteinander kombiniert. Die Forscher benutzten die Exoskelette von Langustenschwänzen und verstärkten sie mit synthetischen Bauteilen, um daraus einen Robotergreifer zu erstellen, der Objekte mit bis zu 500 g Gewicht anheben kann.
Die Exoskelette von Langusten bestehen aus mineralisierten Schalen mit Gelenkmembranen. Sie sind besonders steif und widerstandsfähig bei zugleich hoher Flexibilität. Sie bestehen aus einzelnen Segmenten, die sich unabhängig voneinander bewegen lassen. Dadurch können sich die Langusten im Wasser schnell fortbewegen. Die Wissenschaftler der EPFL haben deshalb angenommen, dass sich die Exoskelette der Krebstiere auch dazu eignen, um sie in der Robotik einzusetzen. Ihre Forschungsergebnisse haben die Wissenschaftler in der Studie „Dead Matter, Living Machines: Repurposing Crustaceans' Abdomen Exoskeleton for Bio-Hybrid Robots“ zusammengefasst, die in Advanced Science erschienen ist.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes YouTube-Video (Google Ireland Limited) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (Google Ireland Limited) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Die Wissenschaftler betteten ein Elastomer in das Exoskelett der Langustenschwänze ein, um darüber jedes einzelne Segment über eine motorisierte Basis ansteuern zu können. Das Exoskelett überzogen die Forscher zusätzlich mit einer Silikonbeschichtung, um es zu verstärken und dessen Lebensdauer zu erhöhen.
Roboterfinger aus Langustenschwänzen
Zwei dieser modifizierten motorisierten Exoskelette fügten die Forscher zu einem Robotergreifer mit zwei Fingern zusammen. In dieser Kombination ist der Greifer in der Lage, viele verschiedene Objekte unterschiedlicher Form und Größe bis zu einem Gewicht von 500 g anzuheben, darunter Textmarker und Tomaten.
Eingeschränkt wird das System lediglich durch die einzigartige biologische Form jedes Langustenschwanzes, da sich der Greifer auf jeder Seite etwa anders biegen kann. Die Wissenschaftler sehen jedoch die Möglichkeit, dieses Problem durch den Einsatz weiterer synthetischer Komponenten in den Griff zu bekommen.
„Obwohl die Natur nicht unbedingt die optimale Form liefert, übertrifft sie dennoch viele künstliche Systeme und bietet wertvolle Erkenntnisse für die Konstruktion funktionaler Maschinen, die auf eleganten Prinzipien basieren“, sagt Josie Hughes, Leiterin des Create Lab.
Videos by heise
Die Forscher sind der Ansicht, dass sich mit fortschrittlichen synthetischen Erweiterungsmechanismen für biologische Strukturelemente etwa biomedizinische Implantate oder Plattformen zur Überwachung von Biosystemen herstellen lassen.



(olb)