

Hüpf-Roboter für Feuchtbiotope
Naiv betrachtet scheinen Wasserläufer Naturgesetze zu ignorieren – dabei reizen sie nur gekonnt die Physik der Oberflächenspannung aus. Ein neuer Mikro-Roboter tut es ihnen gleich und springt sogar.
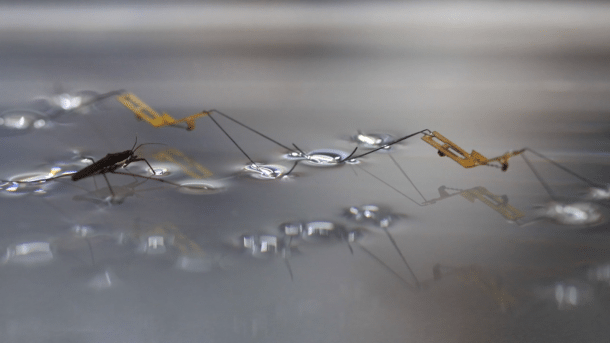
(Bild: Screenshot aus dem verlinkten Video)
Springende Roboter scheinen die Forscher vom Wyss Institute for Biologically Inspired Engineering an der Harvard-Universität zu faszinieren. Kaum ist ihr explosionsgetriebener Roboter-Softie aus dem 3D-Drucker wieder aus den Schlagzeilen verschwunden, zeigen sie in einem Video ihr nächstes Kabinettstückchen: Einen künstlichen Wasserläufer, der wie seine biologischen Vorbilder leicht genug ist, um dank der Oberflächenspannung auf dem Wasserspiegel zu stehen und von diesem flüssigen Untergrund aus sogar hoch in die Luft springt. Der winzige Wasserhüpfer wurde in einer Kooperation mit der Seoul National University entwickelt und das wissenschaftliche Paper dazu in der aktuellen Ausgabe der Zeitschrift Science publiziert.
Die Herausforderung liegt dabei darin, dass die Wasseroberfläche mit genau der richtigen Geschwindigkeit für eine ganz bestimmte Zeit und in exakt die richtige Tiefe eingedrückt werden muss, um einen genügend großen Impuls für den Sprung erzeugen zu können und dabei dennoch nicht die Oberflächenspannung des Wassers zu durchbrechen. Wie die Forscher bei ihrer Arbeit feststellten, haben die biologischen Vorbilder ihres Wasserspringers nicht nur an den Enden abgerundete Beine, die sich in kleine Dellen in der Wasseroberfläche einschmiegen, sie drehen diese beim Absprung noch zusätzlich, was beim Abheben hilft.
Pop-up-Prototypen
Bis dem Mikro-Roboter wie seinem biologischen Vorbild der Absprung vom Wasser gelang, mussten die Forscher einige Prototypen bauen. Die Sprungenergie liefert ein Katapult-Mechanismus, den drei der beteiligten Forscher bereits 2013 entwickelt haben und für den der Bewegungsapparat von Flöhen Pate stand. Die Prototypen entstanden im sogenannten "Pop-up MEMS"-Verfahren, wobei MEMS für "manufacture of microelectromechanical systems" steht, die Produktion von winzigen elektromechanischen Systemen.
Als Rohling für einen Mikroroboter dient dabei ein Sandwich aus vielen Lagen verschiedener Materialien wie Kohlefaser, dem Kunststoff Kapton, Titan, Messing, Piezokeramik und Klebstoffen, die zuvor einzeln mit einem Lasercutter in Form gebracht wurden. Durch geschicktes Design der einzelnen Schichten bilden flexible Schichten zwischen steifen Lagen Scharniere im Verbundmaterial.
Der komplette Roboter wird wie auf einem Ausschneidebogen flach ausgebreitet produziert. Seine Einzelteile sind untereinander verbunden und zudem an ausgewählten Stellen an einer Art Hebebühne aus Kohlefaser befestigt. Nach Verklebung aller Schichten schieben Stifte die beiden Lagen der Hebebühne auseinander, wodurch sich der Roboter dank des ausgeklügelten Klappmechanismus in einem Zug in die geplante fertige Form faltet. Anschließend wird diese durch Tauchlötpunkte fixiert.
Zum Schluss trennt ein Lasercutter die Verbindungen zwischen Arbeitsbühne und Roboter. Dieses Verfahren führten Forscher aus Harvard bereits 2011 exemplarisch bei ihrem winzigen Flugroboter MoBee (für "Monolithic Bee") vor. Der Vorteil: Es greift auf Techniken zurück, die bei der industriellen Herstellung von gedruckten elektronischen Mehrschichtplatinen längst Standard sind.
- Abstract des Papers: Je-Sung Koh, Eunjin Yang, Gwang-Pil Jung, Sun-Pill Jung, Jae Hak Son, Sang-Im Lee, Piotr G. Jablonski, Robert J. Wood, Ho-Young Kim, Kyu-Jin Cho: Jumping on water: Surface tension-dominated jumping of water striders and robotic insects, in: Science Vol. 349 no. 6247 pp. 517-521
(pek)
