
Tentakel-Prothese kann Objekte wie ein Oktopus greifen
Mit Saugnäpfen und biegsamer Elektronik bestückt, ist es einem Forscherteam gelungen, einen künstlichen Krakenarm zu bauen. Gesteuert wird er per Handschuh.
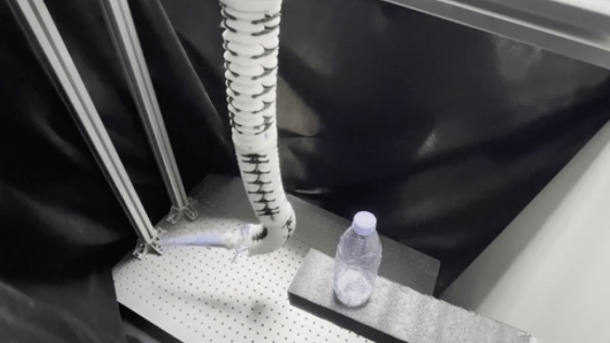
Greifarm mit Tentakeln.
(Bild: E-SOAM / Universität von Singapur)
- Eike Kühl
Oktopusse sind in vielerlei Hinsicht bemerkenswerte Tiere: Intelligent, anpassungsfähig und mit einem flexiblen Bewegungsapparat ausgestattet, der im Tierreich einzigartig ist. Schon die Arme eines Oktopus bilden ein neuromechanisches System, das ein komplexes Zusammenspiel zwischen dem Nervensystem und der Armmuskulatur erfordert. Entsprechend schwierig ist es, dieses System nachzubauen. Doch genau das haben sich Forschende aus China und Singapur zum Ziel gesetzt.
In einer Studie, die nun im Journal Science Robotics erschienen ist, stellt das Team um Zhexin Xie von der Universität von Singapur einen neuartigen Roboterarm vor, der von der Anatomie eines Oktopus beziehungsweise eines Kraken inspiriert wurde. Der Arm ist flexibel und verformbar und kann Objekte wie einen Spielzeug-Hai oder glatte Metallkugeln unter Wasser ertasten und greifen.
E-SOAM ("electronics-integrated soft octopus arm") nennen die Forschenden den künstlichen Krakenarm. Er besteht aus fünf Segmenten mit insgesamt 16 pneumatischen Elementen sowie einem Greifmechanismus mit Saugnäpfen am Ende. Der Arm kann sowohl sensorische Informationen über die Biegung und die Saugkraft als auch die Temperatur von Objekten erfassen und verarbeiten. Die Bewegungen sind denen eines Kraken nachempfunden, wenn dieser seine Beute jagt. Um das möglichst naturgetreu zu simulieren, haben die Forschenden sogar einen lebenden Oktopus dabei gefilmt, wie dieser einen beweglichen Stab greift.
Videos by heise
Den Bewegungsapparat eines Oktopus dann aber in einen "weichen Roboter" einzubauen, ist einfacher gesagt, als getan. "Eine Herausforderung bestand darin, Brüche an der Verbindungsstelle zwischen dem weichen Substrat und den elektronischen Komponenten zu verhindern", heißt es in der Studie. Teil der Lösung war der Einsatz von Flüssigmetallen. Sie wurden mit einem Silikon-Substrat verbunden, wodurch die Schaltkreise insgesamt mehr Flexibilität erhielten. "Das für das E-SOAM verwendete Flüssigmetall kann auch bei starker Ausdehnung Strom leiten", schreiben die Wissenschaftler.
Steuerung per Saugnapf-Fingerhandschuh
Gesteuert wird der E-SOAM mit einem Fingerhandschuh, der den menschlichen Bedienern eine taktile Rückmeldung gibt – ebenfalls durch Saugnäpfe, die in den Fingerhandschuh integriert sind: Wenn der Greifer ein Objekt berührt, erzeugen die Saugnäpfe an der Innenseite des Fingerhandschuhs ein Vakuum. Gleichzeitig leuchten LEDs auf, um die Haftung zu signalisieren. Dadurch ist es möglich, auch ohne Blickkontakt Objekte unter Wasser zu greifen.

Zhexin Xie und seine Kolleginnen und Kollegen sehen in ihrem künstlichen Krakenarm das Potenzial für anpassungsfähige und bewegliche Roboter, bei denen es wichtig ist, eine gewisse Verformbarkeit zu bewahren. Man wolle mit der Studie nicht nur zeigen, wie ein Oktopus sich bewegt, sondern auch neue "Einblicke in die Entwicklung dehnbarer, bioinspirierter autonomer Systeme" liefern.
Das Team ist übrigens nicht das Einzige, das an Tentakel-Prothesen arbeitet. Schon vergangenes Jahr hatten Forschende der Universität von Illinois Urbana-Champaign in einer Studie ein Modell des peripheren Nervensystems eines Oktopus erstellt und auf Basis dessen einen künstlichen – wenn auch nicht ganz so komplexen – Oktopus-Arm modelliert.


(bsc)