
Elektronischer Flaschenteufel mit drahtloser Energieübertragung
Wie von Geisterhand gesteuert steigt der Flaschenteufel im wassergefüllten Glaszylinder nach oben, sinkt nach kurzer Zeit wieder nach unten und wird von LEDs beleuchtet. Dabei hat er keine Batterie an Bord noch ist er mit Kabeln an eine Energieversorgung gefesselt. Ein faszinierendes Objekt zum Staunen, dessen Elektronik aber auch für andere Anwendungsfälle für drahtlose Energieübertragung angepasst werden kann.
Elektrische Energie wird normalerweise über Kabel und Leiter übertragen. Bei einer drahtlosen Energieübertragung nutzt man hingegen elektrische, magnetische oder elektromagnetische Felder, um einen Verbraucher mit Strom zu versorgen.
Beim hier vorgestellten Bastelprojekt wird elektrische Energie mittels resonant induktiver Kopplung zu einem Objekt, dem elektrischen Flaschenteufel, übertragen. Dieser nutzt die Energie, um in einem mit Wasser gefüllten Glaszylinder auf- und abzutauchen und dabei zu leuchten. Die dafür nötige Elektronik ist einfach aufgebaut und lässt sich auch für andere Anwendungen nutzen, bei denen Verbraucher im unteren Wattbereich über eine Distanz von einigen Zentimetern drahtlos mit Strom versorgt werden sollen.
Der klassische Flaschenteufel
Ein Flaschenteufel – auch Cartesischer Taucher genannt – ist eine häufig als kleines Teufelchen ausgeführte Figur mit einem Hohlraum, der nach unten mehr oder weniger offen ist. Die Figur wird in ein hohes, mit Wasser gefülltes Glasgefäß gesetzt, sodass sich im oberen Teil des Hohlraums etwas Luft befindet, im unteren Teil jedoch Wasser. Da der Hohlraum nach oben geschlossen ist, kann die Luft nicht entweichen.
Ist die eingeschlossene Luftblase groß genug, sorgt sie mit ihrem Auftrieb dafür, dass der Flaschenteufel an der Wasseroberfläche schwimmt. Ist sie zu klein, geht er unter. Reicht die Luftblase gerade eben aus, um den Flaschenteufel noch an der Oberfläche zu halten, kann man ihn sinken lassen, indem man die Luft in seinem Inneren etwas komprimiert. Das geschieht indirekt, indem man den Druck des Wassers dadurch erhöht, dass man Druck auf die Wasseroberfläche im Gefäß ausübt.
Der elektrische Flaschenteufel
Bei der hier vorgestellten elektronischen Variante des Tauchers balanciert man diesen im Wasser so aus, dass er ganz langsam auf den Grund sinkt. Eine elektrische Heizung, die nur am Grund des Gefäßes funktioniert, erwärmt die Luftblase. Die Luft dehnt sich aus und sorgt dadurch für etwas mehr Auftrieb. Dadurch steigt der Flaschenteufel zur Wasseroberfläche auf. Da die Luft in seinem Inneren wieder abkühlt, sinkt er nach einer Weile zurück auf den Grund und das Spiel beginnt von vorne. Eingebaute LEDs leuchten, wenn er sich am Grund oder in der Nähe davon befindet, weitere LEDs oder eine Rainbow-LED (je nach gebauter Variante) leuchten auch noch beim Auftauchen und an der Wasseroberfläche eine Weile weiter.
Aufbau des elektrischen Flaschenteufels
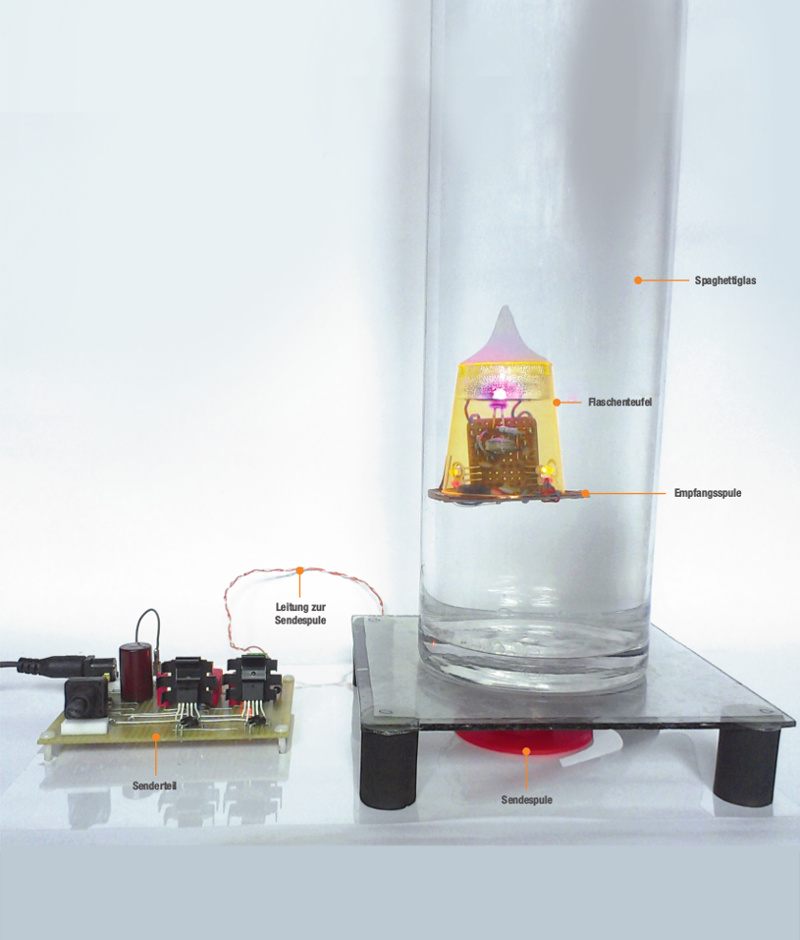
Es gibt zwei Hauptkomponenten:
– Den Senderteil, der sich mit seiner Sendespule außerhalb des Wassergefäßes befindet und per Induktion die elektrische Energie zum Flaschenteufel überträgt. Er wird über ein 12-V-Steckernetzteil versorgt.
– Den eigentlichen Flaschenteufel, im weiteren Taucher genannt, der eine Empfangsspule an seiner Unterseite trägt und im Inneren etwas Elektronik, LEDs sowie die Heizwiderstände. Umgeben ist das ganze mit einer nach unten offenen Hülle.
Dazu kommen das Gefäß für den Taucher (etwa ein Spaghettiglas) und eine Glas- oder Acrylglasplatte mit Füßen, auf der das Gefäß steht und unter dem genügend Platz für die Spule des Senders ist.
Senderteil
Der Senderteil besteht aus 3 Funktionsblöcken: Frequenzgenerator, Leistungsendstufe und Serien-Resonanzkreis. Im Frequenzgeneratorteil liefert das Timer-IC 7555, das als astabiler Multivibrator betrieben wird, ein Taktsignal mit einem Impuls/Pausenverhältnis von 1:1. Die von diesem Takt gesteuerte Leistungsendstufe ist als Brückenschaltung ausgebildet, mit der die Wechselspannung erzeugt wird. Im Brückenzweig liegt der Serienresonanzkreis mit den Kondensatoren C6 bis C10 und der Sendespule. Die Glimmlampe dient als Anzeigeelement. Die Dioden D1 bis D4 verhindern Überspannungen an der Endstufe. LED1 leuchtet bei anliegender Versorgungsspannung.

Mit dem DIP-Schalter können zu C10 weitere Kondensatoren hinzu- oder weggeschaltet werden, um den Resonanzpunkt zu optimieren beziehungsweise die Spulenungenauigkeiten auszugleichen, die beim Wickeln entstehen. Mit dem Poti wird die Frequenz des Timer-ICs eingestellt (Bereich ca. 130 khz bis 170 khz) und es kann damit die Resonanzkurve des Sendeschwingkreises durchlaufen oder eingestellt werden. Wenn die Glimmlampe zu leuchten beginnt, ist man in der Nähe des Resonanzpunktes. Sie leuchtet am hellsten im Resonanzmaximum. Dann ist auch die Stromaufnahme der Schaltung am höchsten (ca. 600 bis 800 mA mit den angegebenen Spulenwerten, ohne dass der Taucher mit Empfänger in der Nähe ist).
Bau des Tauchers

Der Taucher lässt sich mit überschaubarem Aufwand bauen. Sein Herzstück ist etwas Elektronik auf einer Lochrasterplatte, inklusive der Heizwiderstände für die Luftblase. Dazu kommt unten die Empfangsspule auf einer Grundplatte aus Kunststoff, die Hülle und oben eine Spitze – diese ist notwendig, damit der Taucher später nicht aufgrund der Adhäsion von unten an der Wasseroberfläche kleben bleibt. Wer will, kann einen kleinen Propeller aus dünner Kunststofffolie zwischen Spitze und Hülle einkleben. Der Propeller sorgt dafür, dass sich der Taucher beim Aufstieg an die Wasseroberfläche um die Hochachse dreht – das sieht hübscher aus.
Die Elektronik des Tauchers

Im Taucher bildet die Empfangsspule zusammen mit dem Kondensator C1 einen Schwingkreis, der auf etwa 153 kHz abgestimmt ist. Befindet sich der Taucher mit seiner Empfangsspule im Nahbereich (3 bis 4 cm) der aktiven Sendespule, wird Wechselstrom mittels magnetischer Resonanz in die Empfangsspule induziert. Dieser Strom fließt durch die Heizwiderstände und erwärmt sie. Die LEDs 1 und 2 leuchten mit der positiven, die LEDs 3 und 4 mit der negativen Halbwelle des Wechselstroms. Je höher die induzierte Spannung, desto heller leuchten die LEDs. Steigt der Taucher auf, erlöschen sie. Der Kondensator, der in Reihe zu diesen vier LEDs geschaltet ist, dient als kapazitiver Vorwiderstand zur Strombegrenzung.
Optionaler Teil
Mit der oben skizzierten Grundschaltung kann man drei verschiedene Varianten eines optionalen Teils kombinieren. Im optionalen Teil wird der empfangene Wechselstrom in Gleichstrom umgewandelt, der die angeschlossenen zusätzlichen LEDs versorgt und einen sogenannten Goldcap-Kondensator (auch Super-Kondensator oder Supercap genannt) auflädt. Dieser versorgt die LEDs auch dann noch eine Zeitlang mit Energie, wenn sich der Taucher aus dem Nahbereich der Sendespule entfernt hat – also auftaucht, an der Wasseroberfläche treibt oder abtaucht.
Variante 1: Der Wechselstrom wird über die Diode D1 gleichgerichtet (Einweggleichrichtung) und mit dem Widerstand R1 begrenzt. Mit dem Gleichstrom werden die LEDs über ihre Strombegrenzungswiderstände versorgt und der Goldcap aufgeladen, wobei die Zenerdiode die Gleichspannung begrenzt.
Variante 2: Hier wird der Wechselstrom über eine Brückenschaltung mit den Dioden D1 bis D4 gleichgerichtet (Zweiweggleichrichtung). Der Kondensator C3 begrenzt als kapazitiver Vorwiderstand den Strom, der die LEDs versorgt und den Goldcap auflädt. Die Zenerdiode begrenzt wieder die Gleichspannung für den Kondensator. Diese Variante ist durch die Brückenschaltung effizienter und auch am Kondensator als kapazitivem Vorwiderstand fällt keine Wirkleistung ab.
Variante 3: Sie entspricht Variante 2, die 3 LEDs sind hier aber durch eine Rainbow-LED mit automatischem Farbwechsel ersetzt. Den Bau dieser Variante zeigt die folgende Bauanleitung.
Der Luftbefüller
Zum Ausbalancieren des Tauchers muss man das Verhältnis von Luftvolumen in der Blase des Tauchers zu seinem Gewicht variieren. Dafür stellt man noch einen Luftbefüller her, mit dem man dem Taucher auch am Grund seines Gefäßes Luft zuführen kann. Das hat drei Vorteile:
– Es erleichtert das Ausbalancieren, wenn der Taucher dabei im Wasser schwimmt.
– Man kann ihn damit herausfischen, wenn er am Grund liegt.
– Wenn der Taucher eine längere Zeit (6 bis 12 Stunden) im Wasser gewesen ist, dabei auf- und abtaucht oder nur am Boden des Wassergefäßes ruht, taucht er immer unwilliger auf – bis zu dem Punkt, an dem er gar nicht mehr auftaucht, wie stark man ihn auch aufheizt. Offenbar verschwindet allmählich etwas Luft aus der Blase. Der Effekt ist stärker, wenn der Taucher länger am Boden des Wassergefäßes ruht, weil dort der Wasserdruck höher ist. Füllt man aber ein paar Luftbläschen nach, funktioniert er wieder wie zuvor.
Bau des Befüllers
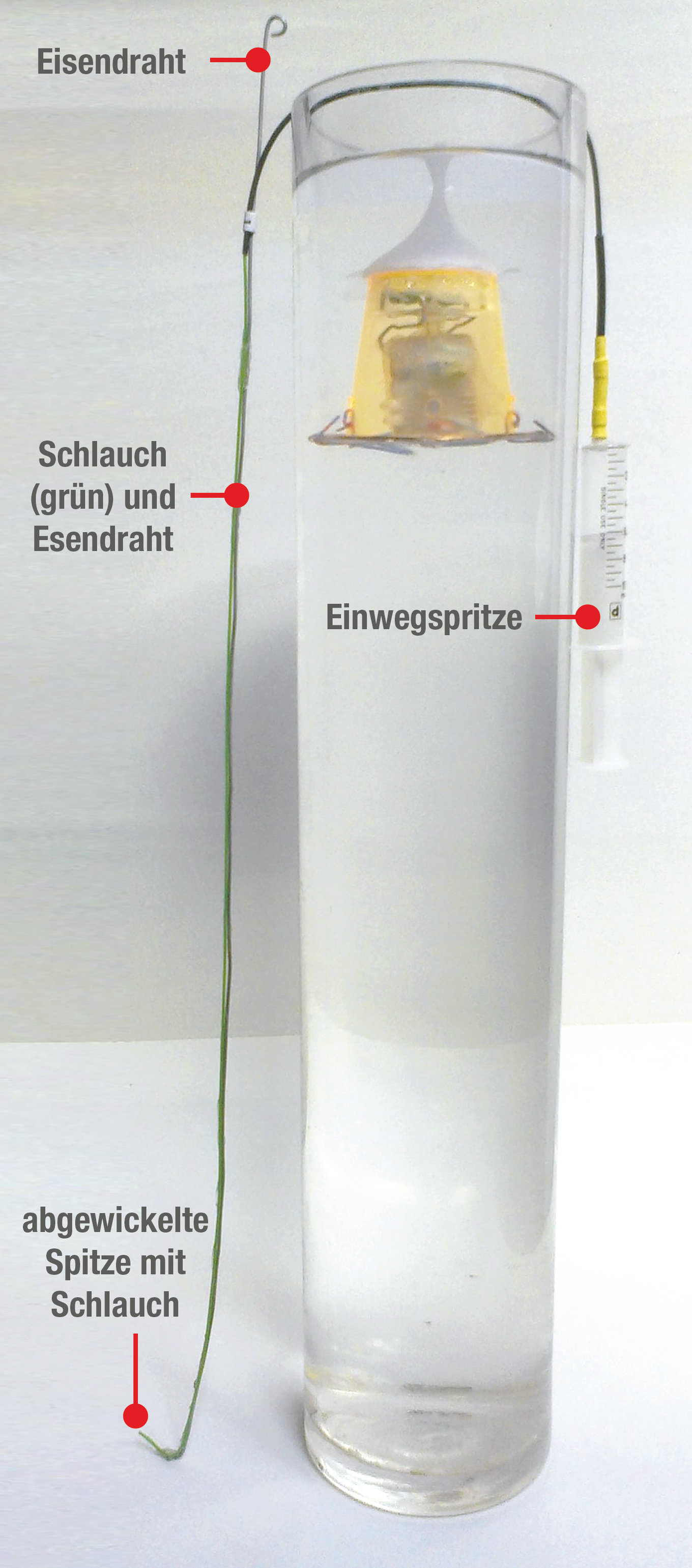
Man braucht einen 1 mm starken Eisen- oder Messingdraht, der etwas länger als das Wassergefäß tief ist. Diesen Draht biegt man unten etwa 1 cm um und befestigt daran mit Heißkleber einen dünnen Schlauch. Als Schlauch eignet sich zum Beispiel die Kunststoffisolation des Schaltdrahts, der für den Bau des Senders verwendet wurde, wenn man die Isolation an einem Stück vom Kupferdraht abgezogen bekommt. Der Schlauch sollte am abgebogenen Teil des Drahtes etwa einen Zentimeter hervorstehen, am oberen Ende etwa 15 cm.
Das obere Ende des Schlauchs verbindet man mit einer 10-ml-Einwegspritze, das untere steckt man fürs Nachfüllen der Luft in eines der vier Wasseraustausch-Löcher des Tauchers. Jetzt kann man mit der Spritze fein dosiert Luft einfüllen. Zur Not funktioniert es auch ohne Spritze mit Hineinblasen.
Zu Wasser lassen

Der fertige Taucher wird seitlich gekippt und so ins Wasser gegeben, wie auf dem Bild zu sehen. Durch die Wasseraustausch-Löcher füllt sich sein Inneres, durch das Kippen verbleibt aber im oberen Teil eine Luftblase. Das Volumen dieser Luftblase muss so bemessen werden, dass der Taucher gerade nicht mehr an der Wasseroberfläche bleibt, sondern ganz langsam auf den Grund sinkt. Die Heizwiderstände müssen dabei innerhalb der Luftblase liegen und dürfen keinen Kontakt zum Wasser haben.
Schritt für Schritt
– Den Taucher ins Wasser geben, wie eben beschrieben.
– Taucher aufrichten und loslassen. Kippt er um oder schwimmt er stabil an der Wasseroberfläche hat er noch zu viel Luft. Säuft er gleich ab, hat man ihn zu stark gekippt und die ganze Luft ist entwichen. Falls er dann auf der Seite liegt, mit dem Luftbefüller rausfischen und von vorne anfangen. Steht er aufrecht am Grund, mit Luft befüllen.
– Hat er zu viel Luft, wieder etwas kippen und so drehen, dass die vier kleinen Entlüftungslöcher oben liegen. Soweit kippen, dass ein Teil der Luftblase unterhalb dieser Löcher liegt und mit dem Zeigefinger gegen die Hülle klopfen. Durch die Löcher wird jetzt ein kleines Luftbläschen freigesetzt; fortgesetztes Klopfen löst weitere. Den Taucher wieder aufrichten und testen, ob die Balance stimmt. Schwimmt er weiterhin oben oder taucht er wieder auf, wenn man ihn unter die Wasseroberfläche gedrückt hat, wiederholt man den Vorgang. Sinkt er schnell ab, hat er zu wenig Luft und wird trotz Heizung nicht wieder auftauchen.
– Ist die Luftblase im Taucher sehr groß, dauert das Ausbalancieren über die kleinen Entlüftungslöchern zu lange. Man dreht jetzt den Taucher in diesem Fall so weit, dass eines der vier Wasseraustausch-Löcher oben liegt und kippt ihn vorsichtig, bis ein Teil der Luft darüber entwichen ist. Dann weiter wie oben beschrieben.
– Mit dem Luftbefüller kann man den Taucher am Grund befüllen und beim Auftauchen wieder neu ausbalancieren. Hat man das einige Male gemacht, bekommt man ein Gefühl dafür, sodass das Ausbalancieren schneller gelingt.
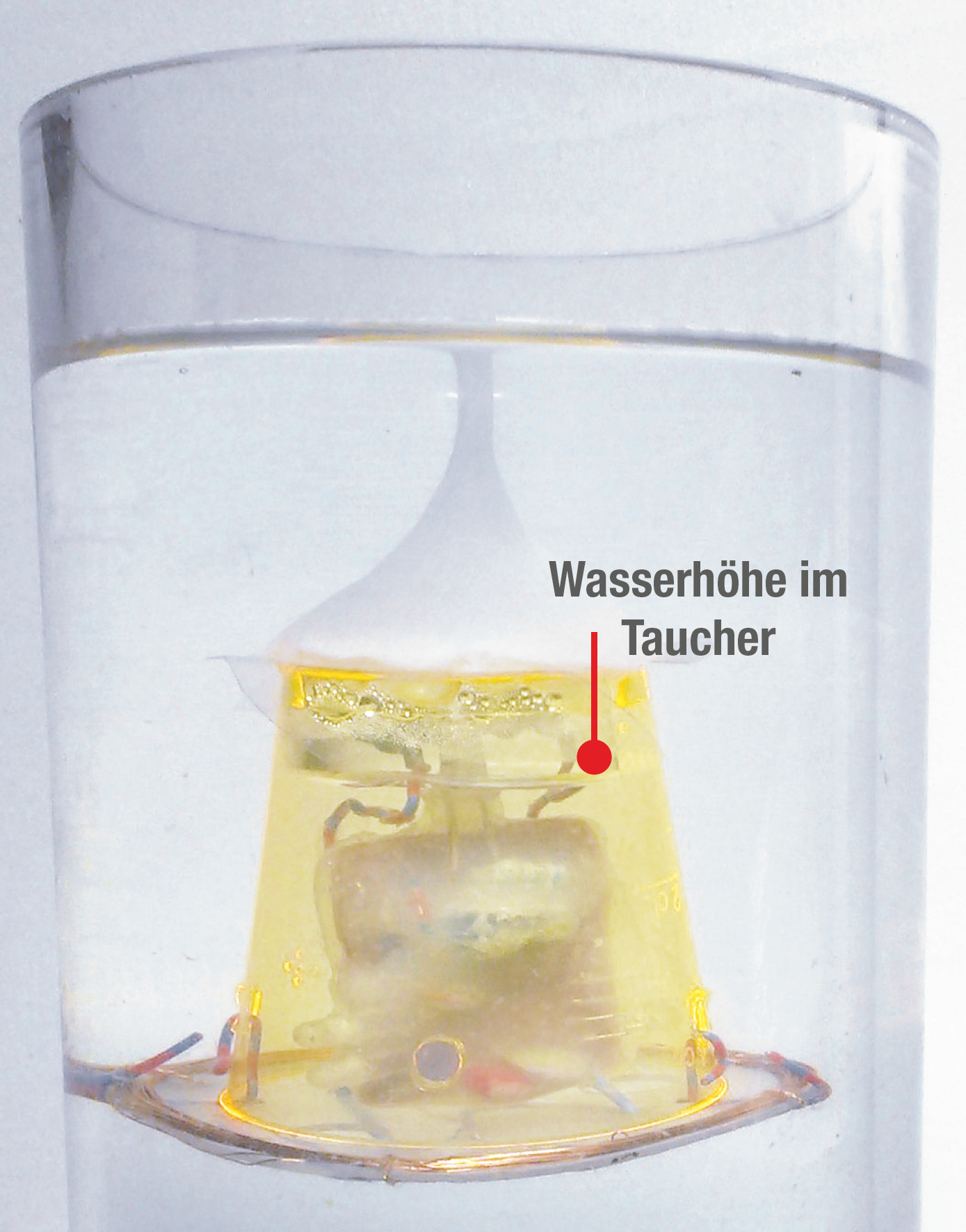
– Ist der Taucher ausbalanciert, prüft man, ob sich die Heizwiderstände innerhalb der Luftblase befinden. Kommt Wasser an die Widerstände, obwohl ihre Höhe richtig eingestellt ist, muss etwas Ballast in Form kleiner Steinchen oder Glasgranulat (keine Metallteile!) im Taucher oder an seiner Hülle befestigt und neu ausbalanciert werden.

– Der Richtwert für die Sinkzeit eines Taucher mit Propeller liegt bei etwa 30 Sekunden bei einer Wasserhöhe von 45 cm, wobei die Sinkzeit startet, sobald die Spitze des Tauchers die Wasseroberfläche verlässt, und gestoppt wird, wenn der Taucher auf dem Grund aufsetzt.
Abgleich des Sendeteils mit dem Taucher
Die Sendespule bringt man unterhalb des Podestes oder Tischchens an, auf dem das Wassergefäß mit dem Taucher steht. Die Distanz zur Taucherspule sollte etwa 3 bis 4 cm betragen, die beiden Spulen sollten zumindest grob aufeinander ausgerichtet sein – Spulenmitte über Spulenmitte.
Hat man kein Amperemeter zur Hand, müssen die dafür vorgesehenen Anschlüsse überbrückt werden und man nimmt den Sender in Betrieb wie beim Funktionstest beschrieben. Das Poti stellt man so ein, dass am Taucher die unteren LEDs am hellsten leuchten. Nach einer Weile sollte auch die obere Rainbow-LED aufleuchten und sich der Taucher kurz darauf auf seinen Weg nach oben machen.
Mit Amperemeter entfernt man zunächst den Taucher samt Glas aus der Nähe der Sendespule. Das Poti dreht man ganz nach links und dann langsam nach rechts (im Uhrzeigersinn). Auf dem Amperemeter sieht man den Strom bis zu einem Maximum ansteigen und dann wieder zurückgehen. Wenn der Strom wieder zurückgeht und 0,4 Ampere erreicht, ist der Sender eingestellt. Dann bringt man den Taucher in seinem Glas wieder in seine Position. Der genannte Strom von 0,4 Ampere ist ein Richtwert – für einen gut ausbalancierten Taucher reichen auch 0,3 Ampere aus.
Der Koppelfaktor
Befindet sich der Taucher in seiner Position über der Sendespule und dreht man am Poti bis zum Resonanzmaximum, bemerkt man, dass der maximal einstellbare Strom wesentlich geringer ist als zuvor, als sich der Taucher weit weg von der Sendespule befand. Das hat seinen Grund in der gegenseitigen Beeinflussung der Sende- und der Empfangsspule und tritt als sogenannter Koppelfaktor in Erscheinung.
Mit zunehmender Entfernung der Spulen voneinander nimmt dieser Koppeleffekt ab und die Stromaufnahme des Senders bei eingestelltem Resonanzmaximum steigt bis zum Maximalstrom an. Das passiert auch, wenn der Taucher auftaucht. Um die Sende-Endstufe und die Spule nicht unnötig mit dem hohen Strom zu belasten, empfiehlt es sich, mit dem Poti nicht den Resonanzmaximalwert einzustellen, sondern nur so viel, wie zum Auftauchen nötig ist.
Am Taucher selbst gibt es nichts einzustellen: Die Resonanzfrequenz seines Schwingkreises liegt mit den angegebenen Werten und unter Berücksichtigung von Bauteile- und Fertigungstoleranzen zwischen 140 kHz und 170 kHz, verläuft aber durch die Last von Heizwiderständen und LEDs recht flach – Leistung kann deshalb in einem gewissen Frequenzbereich übertragen werden, nicht nur auf einer bestimmten genauen Frequenz.
In der Nähe der beiden Spulen sollten sich keine größeren Metallteile befinden, da sich dadurch der Schwingkreis verstimmen kann und ein Leistungsverlust eintritt. Ein paar kleine Schrauben, etwa im Podest unter dem Glasgefäß, sollten aber keine Probleme verursachen.
Ausblick
Der elektrische Flaschenteufel zeigt eine einfache Möglichkeit, elektrische Energie im unteren Wattbereich über kurze Entfernungen an Geräte zu übertragen, die sich nicht oder nur sehr umständlich über eine Kabelverbindung versorgen lassen.
Die hier gezeigte Schaltung lässt sich auf mögliche weitere Einsatzgebiete übertragen, etwa:
– Illumination eines Mobiles oder von Objekten, die dank magnetischer Leviatiton schweben (c’t Hacks 4/14, S. 18)
– Energieübertragung an rotierende Objekte
– Beleuchtungseffekte unter Wasser, etwa in Aquarien
– Energieübertragung durch Wände oder in abgeschlossene Gehäuse, solange diese nicht aus Metall sind.
Die hier verwendete Senderschaltung ist vielseitig einsetzbar, einfach zu modifizieren und lädt zum Experimentieren ein. Die Reichweite der Energieübertragung hängt unter anderem vom Spulendurchmesser ab – je größer dieser ist, desto weitere Entfernungen lassen sich überbrücken. Allerdings muss man sich fragen, welchen Wirkungsgrad man bereit ist, zu akzeptieren: Bei gegebener Spulengröße verschlechtert sich dieser bei zunehmender Entfernung rapide. —pek