

RoboCup German Open: Unaufmerksame Kellner, standhafte Retter
Noch hat Kollege Roboter das volle Lokal nicht besser im Blick hat als seine menschlichen Pendants. Vielversprechender zeigten sich die Rettungsroboter, darunter ein Self-Made-Modell aus der Garage.
Auch am zweiten Wettbewerbstag der RoboCup German Open in Magdeburg waren das Zuschauerinteresse groß, jede gelungene Aktion der Roboter wurde wohlwollend beklatscht und sich über deren Stürze und Fehlschüsse aus kürzesten Distanzen amüsiert. Dass trotzdem kein rechter Schwung aufkommen wollte, lag wohl daran, dass es bei 44 Teams in den Major Leagues, die sich auf sechs Spielfelder und Arenen verteilten, einfach zu viel Leerlauf gab – und wenn etwas passierte, war es häufig enttäuschend.
Noch einen Kaffee, bitte
Etwa bei Szenen aus dem Alltag, die viele schon erlebt haben dürften: Mit hoch erhobenem Arm versucht man, den Kellner auf sich aufmerksam zu machen, der aber mit den Gedanken und all seinen Sinnen offenbar ganz woanders ist. Diesmal ist der Kellner ein Roboter – der seinem menschlichen Gegenstück an Sturheit aber nicht nachsteht. Beim Restaurant-Test der RoboCup@home League behauptet er zwar verbal, nach winkenden Gästen Ausschau zu halten, zeigt aber ansonsten keinerlei Reaktion.
Drei Teams nahmen an dem Test teil, der im Gastronomiebereich der Messehalle 1 stattfand. Aber nur der Roboter des Teams Tech United aus Eindhoven zeigte die Aufmerksamkeit, die man von einem guten Kellner erwartet. Andere Tests in der @home-Arena verliefen ähnlich, erforderten mehrere Neustarts, gelangen nur teilweise oder auch gar nicht.
RoboCup@home und @work (8 Bilder)

So der mit einiger Spannung erwartete erste Auftritt des kommerziell erhältlichen Roboters Pepper als eine der beiden neuen Standardplattformen der Liga. Das Team ToBI von der Universität Bielefeld hatte sich allerdings auch viel vorgenommen, indem es Arme und Hände des Roboters tatsächlich zum Greifen nutzen wollte. „Der Roboter ist ja in erster Linie zum Repräsentieren und für Kommunikationsaufgaben gedacht“, sagt Wettbewerbsleiter Sven Wachsmuth. „Mit seinen Armen soll er vor allem gestikulieren.“ So gelang der Griff bei diesem ersten öffentlichen Versuch denn auch nicht, der Arm zuckte noch nicht einmal.
Vorbereiten auf die WM
Meisterschaft der Maschinen: Die Simulationsligen im RoboCup
In Magdeburg sind die Bielefelder die einzigen, die mit einem der beiden für diese Liga ausgewählten Standardroboter antreten. Bei der RoboCup-Weltmeisterschaft Ende Juli in Nagoya (Japan) rechnet Wachsmuth mit mehreren Teams, die sowohl den Pepper als auch den Human Support Robot (HSR) von Toyota verwenden. Bis dahin ist noch etwas Zeit und die Erfahrungen aus Magdeburg werden sich bei der Vorbereitung auf das große Turnier hoffentlich als hilfreich erweisen.
Für viele Teams sind die German Open ohnehin ein wichtiger Meilenstein auf dem Weg zur Weltmeisterschaft, wo sie ihre Systeme in erster Linie unter realen Turnierbedingungen testen können, sich im Wettbewerb aber nicht unbedingt gut platzieren müssen. Manchen Teilnehmern mag der Leerlauf daher durchaus willkommen gewesen sein, bot er doch reichlich Gelegenheit für Testläufe zwischendurch.
Rettung aus der Garage
Rettungsroboter im Einsatz (6 Bilder)

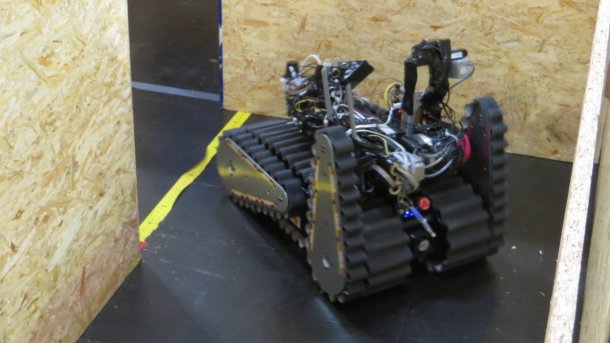
Es war auch Zeit für Gespräche, um sich zum Beispiel den Rettungsroboter des ungarischen Teams Rescube erklären zu lassen, das zum zweiten Mal bei den German Open antritt – das erste Team aus Ungarn überhaupt beim RoboCup. Sie seien nicht wirklich ein Universitätsteam, sagt Teamleiter Péter Kopiás. Es hätte viel zu lange gedauert, über die Universität die nötigen Mittel einzuwerben. Daher hätten sie den Roboter in seiner Garage mit Privatmitteln zusammengebaut.
Als besonderes Designmerkmal hebt er hervor, dass die Batterien in den Rädern untergebracht sind, was für einen tiefen Schwerpunkt sorgt. Zudem seien empfindliche Komponenten dort gut geschützt. Damit der Roboter auch auf steilen Treppen nicht kippt, könne der Abstand zwischen Radachsen verlängert und so der Schwerpunkt in die Fahrtrichtung verlagert werden. Wichtig sei auch die Positionierung der Kamera, die dem Operator einen Blick von oben auf den Roboter bietet und so das Manövrieren gerade bei engen Durchfahrten erleichtert.
Das präzise Zentrieren zwischen Wänden zählt zu den Pflichtaufgaben, die in der Rescue League bewältigt werden müssen, nach Möglichkeit autonom. Autonomes Verhalten können die Ungarn in diesem Jahr allerdings noch nicht bieten. Sie hätten sich auf den Manipulator konzentriert, so Kopiás. Der muss in diesem Jahr in der Lage sein, bis zu zwei Kilo schwere Klötze aufeinander zu stapeln, während zuletzt noch eine Tragkraft von wenigen hundert Gramm ausreichte. Mit dem Roboterarm gelang es dem Team auch, eine Tür zu öffnen. Es dauerte eine Weile, sah nicht gerade elegant aus, aber schließlich war die Tür offen. Ein tolles Ergebnis, insbesondere für einen Roboter, der für weniger als 10.000 Euro in einer Privatgarage entstanden ist.
Fußballer laufen sich noch warm

Auf den Fußballfeldern ist dagegen bisher noch kein deutlicher Fortschritt zu erkennen. Sowohl in der Humanoid League als auch in der Standard Platform League tapsen die Roboter oft ziemlich umständlich herum und brauchen lange, bis sie in Schussposition sind – wenn sie den Ball überhaupt erreichen.

Aber vielleicht haben einige Teams die Samstagsbegegnungen auch in erster Linie als Testgelegenheiten gesehen, um sich für die Finalspiele am Sonntag fit zu machen. Wäre nicht das erste Mal, warten wir‘s ab. (uk)
