

Neue Ideen für mobile Roboter: Hüpfefrosch und Krabbelkugel
Forscher demonstrieren neue Konzepte für die Fortbewegung von Robotern. Ein Roboter kommt springend voran, ein anderer rollt auf 32 verstellbaren Beinen.
(Bild: IEEE Spectrum (Screenshot aus Video))
Anfang Oktober setzte die japanische Raumsonde Hayabusa-2 auf dem Asteroiden Ryugu drei Roboter ab, die sich hüpfend fortbewegen. Die Methode lag nahe, weil bei der geringen Schwerkraft dieses Himmelskörpers jede andere Art der Fortbewegung ohnehin in unkontrollierte Sprünge gemündet hätte. Ein Forschungsteam der University of California Berkeley hat jetzt einen froschartigen Roboter vorgestellt, der auch bei Erdgravitation mit präzisen Sprüngen vorankommt.
Hüpfende Fortbewegung auch auf der Erde
Der Salto-1P (Saltatorial Location Terrain Obstacles) genannte Roboter ist inspiriert von der hüpfenden Fortbewegungsweise der in Afrika lebenden Galagos oder Buschbabys, wie Duncan Haldane in einem älteren Video erklärt. Diese Tiere können sich extrem zusammenkauern und dabei die Energie für den Sprung konzentrieren. Auf ähnliche Weise spannt bei Salto-1P ein Motor die Feder für den Sprung, der den kleinen Roboter (der ein bisschen an Daniel Düsentriebs Helferlein erinnert) bis zu einen Meter hoch schleudert. Auf Ryugu hätte er sich damit wahrscheinlich ins All katapultiert.
Anders als die Asteroiden-Rover weiß Salto-1P allerdings, wohin er springt und kann sehr genau zielen. In einem jetzt veröffentlichten Video zeigen Justin K. Yim und Ronald S. Fearing, wie Salto-1P vom Boden auf einen Stuhl, von dort auf einen Tisch und wieder zurück springt.
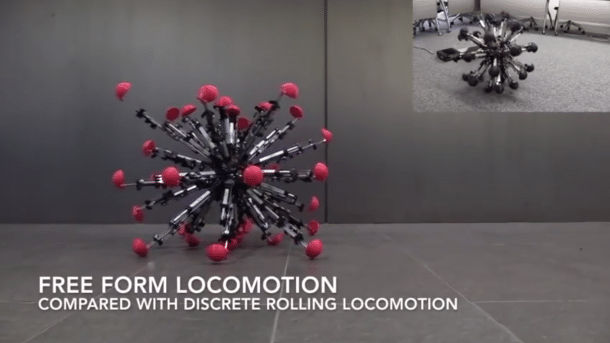
Kugelroboter mit 32 Beinen vorgestellt
Auf der Robotik-Konferenz IROS hat ein Forschungsteam von der Tokioter Keio University und der University of Tokyo quasi das Gegenstück zu dem Einbeiner vorgestellt: Der japanische Roboter bewegt sich mit 32 Beinen vorwärts. Sie sind sternförmig angeordnet und können ihre Länge teleskopartig zwischen 25 und 50 Zentimetern variieren. Bei gleicher Länge aller Beine, kommt die Gestalt des Roboters daher einer Kugel nahe. Durch gezieltes Ausfahren oder Zusammenziehen einzelner Beine lässt er sich in beliebige Richtungen steuern, wie die Forscher in einem Video demonstrieren.
Evan Ackerman vermutet in IEEE Spectrum, dass der 10 Kilogramm schwere „Mochibot“ genügend Platz habe, um eine Vielzahl von Sensoren zu transportieren. Die Beine könnten zudem genutzt werden, um Bodenproben zu sammeln. Auch die Robustheit sei nicht zu unterschätzen: Bei 32 Beinen fällt es nicht besonders ins Gewicht, wenn mal eins bricht. (tiw)
