

Lebensmittelversorgung: Bauer sucht Roboter
Bits kann man nicht essen. Dennoch können digitale Technologien dazu beitragen, dass künftig alle Menschen satt werden.
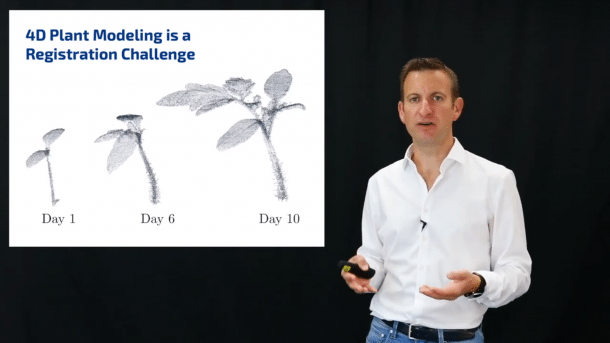
Cyrill Stachniss zeigt, wie Pflanzen beobachtet und analysiert werden
(Bild: ICRA'20 Keynote Talk by Cyrill Stachniss: Robots in the Field - Towards Sustainable Crop Production)
Wie die Lebensmittelversorgung der Zukunft und die technologische Unterstützung landwirtschaftlicher Betriebe aussehen könnte, ist eines der Themen der Robotikkonferenz ICRA 2020 (International Conference on Robotics and Automation). Dort skizzierte Cyrill Stachniss (Universität Bonn) in einer Keynote zunächst einmal die Herausforderung: Von 2010 bis 2050 müsse auf den Agrarflächen weltweit so viel produziert werden wie von den Anfängen der Landwirtschaft bis 2010. Aber wie soll das gehen, da die Fläche begrenzt ist, chemischer Pflanzenschutz eher reduziert als erweitert werden soll und der Klimawandel die Situation zusätzlich erschwert? Ein Ansatzpunkt sei das Management, das mithilfe von Robotern verbessert werden könne.
Genaue Analyse
Im Exzellenzcluster Phenorob, den Stachniss leitet, sollen die Einsatzmöglichkeiten von Robotern im Austausch von Ingenieuren und Agrarwissenschaftlern erkundet werden. Dazu zählt zunächst die detaillierte Beobachtung des Pflanzenwachstums mit hoher räumlicher Auflösung, um Einflussfaktoren auf das Wachstum zu identifizieren und Krankheiten oder Nährstoffmangel frühzeitig erkennen zu können. Eine besondere Herausforderung ist die Beobachtung des Untergrunds und der Pflanzenwurzeln mit nicht-invasiven Methoden, die helfen soll, Ernteerträge besser vorherzusagen und den Einsatz von Ressourcen zu optimieren.
Auch die Vorteile des gemeinsamen Anbaus verschiedener Pflanzen sollen untersucht werden, um die jeweils optimalen Größen, Formen und Zusammenstellungen von Feldern zu finden. Roboter könnten von dem Zwang befreien, die Felder ausschließlich rechteckig zu gestalten, und mehr Vielfalt ermöglichen.
Videos by heise
Dazu müssen sie allerdings die verschiedenen Pflanzen sicher erkennen und voneinander unterscheiden können. Dabei geht es um erhebliche Datenmengen, die segmentiert und annotiert werden müssten, so Stachniss. Als Beispiel für die Größenordnungen, mit denen gearbeitet wird, nannte er ein fünf Hektar großes Feld, das mit einer Auflösung von zwei Millimetern erfasst werde. Bei der Entwicklung von Lernverfahren müsse auch Hintergrundwissen, etwa zur Pflanzengeometrie, einfließen. Eine erste Firmenausgründung des Projekts biete hierzu bereits Dienstleistungen an.
Stark variierende Bedingungen
Für die Orientierung der Roboter auf dem Feld könne auf Technologien zurückgegriffen werden, die in anderen Zusammenhängen entwickelt worden sind. Stachniss verwies beispielhaft auf Verfahren zur Selbstlokalisierung in dynamischen Umgebungen, die autonomen Fahrzeugen helfen, statische Orientierungspunkte von veränderlichen wie Fußgängern, zu unterscheiden. Gleichwohl sei es eine große Herausforderung, die Funktion der Systeme unter den stark variierenden Bedingungen auf landwirtschaftlichen Flächen zu gewährleisten, die aufgrund des Wetters und des Pflanzenwachstums von Tag zu Tag anders aussehen.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes YouTube-Video (Google Ireland Limited) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (Google Ireland Limited) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Stachniss erwartet, dass Roboter zur gezielten Unkrautbekämpfung als erste einsatzreif werden. Allein durch die punktgenaue Nutzung chemischer Mittel könne deren Verbrauch schon reduziert werden. Andere Methoden, wie die Zerstörung unerwünschter Pflanzen durch Laser, dürften schon bald folgen. Danach rechne er mit dem Einsatz von Robotern zur gezielten Ausbringung von Dünger und zur frühzeitigen Erkennung von Pflanzenkrankheiten.
Energieversorgung und Einsatzszenarien
Mit dem Problem der Energieversorgung habe sich das Projekt bisher nicht beschäftigt, sagte Stachniss auf Nachfrage. Für die Forschung seien Multikopter mit Flugzeiten bis zu 30 Minuten ausreichend. In dieser Zeit ließe sich ein Feld von 5 ha Ausdehnung erfassen. Im alltäglichen Einsatz dürften dagegen eher Drohnen mit starren Flügeln genutzt werden, die deutlich länger in der Luft bleiben können.


(kbe)
