

Weicher Tauchroboter erfolgreich im Marianengraben getestet
Ein neuartiger autonomer weicher Tiefsee-Tauchroboter ahmt einen wabbeligen Tiefseefisch nach. Er könnte ganz neue Forschung ermöglichen.
(Bild: Tiefeng Li et.al)
Ohne Kabel-Nabelschnur, sondern autonom schwimmend ist ein neuer weicher Tiefsee-Tauch-Roboter des chinesischen Teams um Tiefeng Li (Zhejiang University, Hangzhou, China) unterwegs. Seine Jungfern-Tauchfahrten hat die kleine Maschine im Marianengraben in bis in 10.900 Meter Tiefe mit Bravour gemeistert und es damit auch aufs Titelblatt der aktuellen Ausgabe des Fachmagazins Nature geschafft.
In den unerforschten Tiefen warten noch viele unbekannte Geschöpfe, bizarre Ökosysteme und Rohstoffe-Lagerstätten auf ihre Erforschung. Die größte Herausforderung ist der hohe Druck: Die komplexen mechatronischen Systeme der Tauchroboter werden mit starrem Gehäusen und Druckkompensationssystemen geschützt. Gerade Unterwasser-Vehikel für Tiefen zwischen 3000 und 10.000 sind schwer, sperrig und unhandlich – ihr Betrieb bedingt große Schiffe mit starkem Greifarm und viel Crew. Eine neue Generation kleiner, weicher Tauchroboter geht andere Wege.
Videos by heise
Weich ist Trumpf
Freischwimmende Tiefsee-Geschöpfe wie Fische, Kopffüßer und Medusen haben mit weichen Strukturen und Geweben effektive und energiesparende Anpassungen an hohe Drücke entwickelt. So haben sich die chinesischen Ingenieure bei ihrem jüngsten Projekt vom Scheibenbauch inspirieren lassen. Scheibenbäuche (Liparidae) leben bis in sehr großen Tiefen, 2017 war US-Wissenschaftlern im Marianengraben in 8145 Metern eine neue Art vor die Kameras geschwommen: der Marianen-Scheibenbauch (Pseudoliparis swirei).
(Bild: Tiefeng Li et.al)
Seinen deutschen Namen hat das Flossentier von seinem Bauch-Saugnapf, der englische Name Snailfish – Schneckenfisch – bezieht sich auf die wabbelige Körper-Konsistenz. Die weichlichen, aber kompakten Körper sind besonders resistent gegen hohe Drücke. Zusätzlich haben Tiefsee-Scheibenbäuche weiche Knochen und unvollständig verwachsene Schädel, die unter Druck flexibel sind.
Elastomere, Hydrogel und Silikon
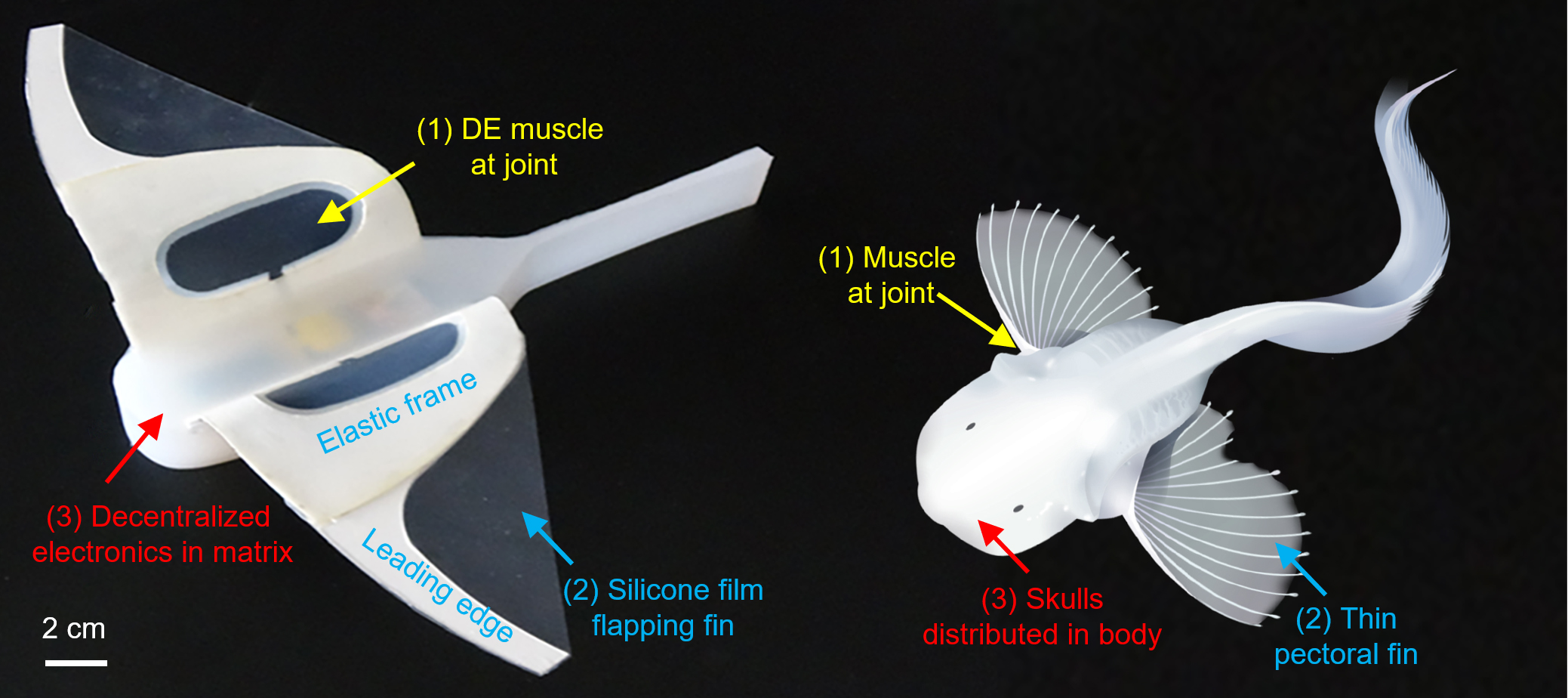
Der neue autarke Tauchroboter ist von der Außenhülle bis zu seinen inneren Strukturen aus weichen Materialien konstruiert: aus dielektrischen Elastomeren, ionisch leitendem Hydrogel und Silikon. Rahmen aus Acrylverbindungen geben dem Körper und den Flügeln Form und Halt, sie werden mit Lagen elastischer Materialien wie Silikon ausgefüllt.
Die Elektronik der Stromversorgung, Steuerung und Aktivierung ist in die Silikonmatrix integriert und dadurch vor Druck geschützt. Um Scherspannungen an den Grenzflächen zwischen elektronischen Bauteilen zu vermeiden, haben die Konstrukteure die Elektronik dezentralisiert: Durch größere Abstände zwischen den einzelnen Bauteilen oder sogar durch ihr Abtrennen von der Leiterplatte – eine echte Innovation! Wie beim Fisch-Vorbild sitzt dieses zentrale Steuerungsorgan im Kopf. Auch die Fortbewegung des Tauchroboters ähnelt dem Marianen-Scheibenbauch: Mit dem Auf- und Ab-Schlagen der flügelartigen Brustflossen vollführen beide Geschöpfe einen Unterwasserflug. Die robotischen Antriebs-Flossen bestehen aus dielektrischem Elastomer-Material, das elektrische Energie direkt in mechanische Arbeit umwandelt: Auf einen elektrischen Impuls hin kontrahieren die künstlichen Fasern – genau wie echte Muskelfasern.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes Video (TargetVideo GmbH) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (TargetVideo GmbH) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Beim Tiefsee-Test schwamm das Mini-Vehikel 6,4 Zentimetern pro Sekunde – doppelt so schnell wie bisherige weiche Roboter. Allerdings immer noch langsamer als herkömmliche AUVs (Autonomous Underwater Vehicle). Die Batterieladung reichte dabei für immerhin drei Stunden. Ausgesetzt und unterstützt wurde das kleine Tauch-Vehikel von einem großen konventionellen Tauchroboter, der auch die Fotos und Videos der Testfahrt aufgenommen hat.
Klein, weich, leise und kostengünstig
Mit diesem erfolgreichen Jungfern-Tauchgang haben Li und sein Team das große Potenzial weicher Roboter für den Einsatz unter extremen Bedingungen gezeigt. Die kleinen Maschinen können zwar keinen starken Strömungen widerstehen, sind aber gerade für diffizile Forschungsvorhaben sehr geeignet: Ihre weichen Oberflächen können beispielsweise schonend zarte Meereswesen einsammeln und gefährden keine zerbrechlichen Biotope wie Korallenriffe oder archäologische Artefakte. Unerkannt könnten sie in Schwärmen mitschwimmen und die Bestandsdaten aufzeichnen.
Ihr Antrieb ist wesentlich leiser als die Motoren größerer AUVs, Tiere werden also nicht gestört. Einzeln oder als Schwarm könnten sie zur Überwachung des Ozeans sowie zur Verhinderung oder der Reinigung von Meeresverschmutzungen eingesetzt werden. Ihre geringe Größe macht den Betrieb einfacher und preiswerter. Unterwasser-Forscher aller Fach-Disziplinen dürften für dieses neue Tool schnell neue Anwendungen finden, für Forschungsfragen, die noch kein Mensch erdacht hat.


(mho)
