

Controllerboard Carambola
Auch wenn der Trend bei Controllerboards derzeit in Richtung ARM-Prozessoren geht, gibt es dennoch interessante Lösungen, die auf MIPS setzen.
- Daniel Bachfeld
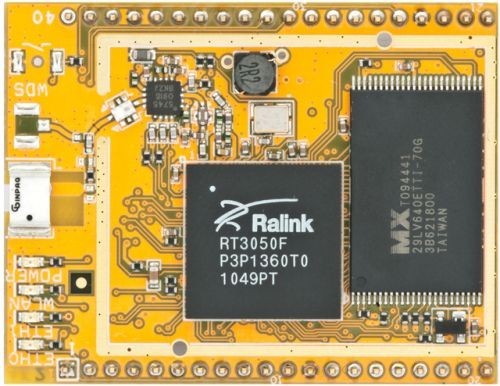
Der litauische Hersteller 8devices bietet für 22 Euro das kleine Board Carambola mit einem MIPS-SoC RT3050 (320 MHz) von Ralink an. Die Lösung enthält 8 MByte Flash sowie 32 MByte RAM und hat praktischerweise gleich WLAN (802.11 b/g/n) an Bord. Auf der 35 x 45 Millimeter kleinen Platine ist bereits eine Antenne vorhanden. Wer lieber drahtgebunden netzwerkt, für denen stehen zwei Ethernet-Ports mit 100 MBit/s zur Verfügung. Allerdings fehlen dem kleinen Board die Transceiver und die RJ45-Anschlüsse, die man nachrüsten muss. Gleiches gilt für den USB-2.0-Port (On-the-Go), die serielle Schnittstelle und die Stromversorgung (maximal nur 1,5 Watt).
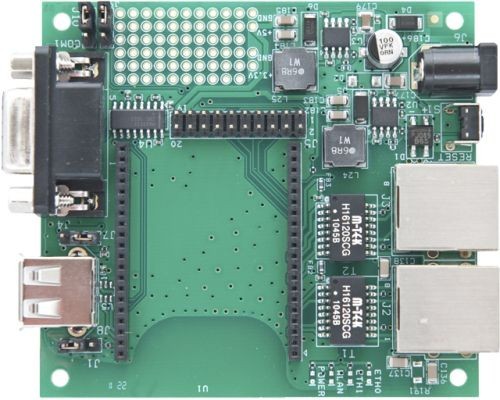
Die Carambola-Platine wird einfach in das Entwickler-Board gesteckt. Daneben enthält der RT3050 Ausgänge für GPIO mit 3,3 V, die sich als digitale Ein- und Ausgänge oder für den I2C-Bus nutzen lassen. Die Pins werden auf dem Entwicklerboard auf eine separate Stiftleiste geführt, an die eine kleine Prototyping-Fläche für eigene Aufbauten grenzt.
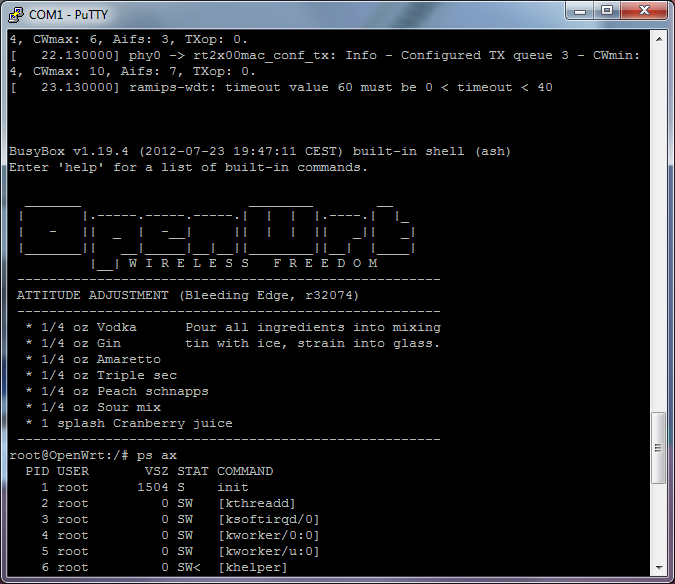
Als Betriebssystem läuft das Linux-Derivat OpenWrt für MIPS, das im Auslieferungszustand bereits mit dem Kernel 3.2.8 installiert war. Apropos Lieferung: Der Hersteller hat seinen Sitz in Litauen, das zur EU gehört. Probleme mit dem Zoll sollte es nach der Bestellung somit nicht geben. Nach unserer Bestellung tat sich aber eine zeitlang nichts, obwohl der Shop "In Stock" angezeigt hatte. Auch auf Nachfrage per Mail, wann denn mit der Lieferung zu rechnen sei, reagierte der Hersteller zunächst nicht. Einen Tag später erhielten wir jedoch die Nachricht, dass das Paket nun unterwegs sei.
Praxis
Als kleines Projekt wollten wir einen WLAN-Access-Point mit drahtloser Webcam umsetzen. Die erforderlichen Treiber für das Wi-Fi-Modul waren in dem installierten OpenWrt-Build bereits enthalten, ebenso das für den Betrieb als AP erforderliche Paket wapd (mini) sowie die wireless-tools. Ein DHCP-Server läuft ebenfalls bereits (dnsmasq) und erwartet nur noch eine sinnvolle Konfiguration. Für eine Erstkonfiguration des Carambola als AP liefert das Wiki des Boards nützliche Hinweise, für weitergehende Konfigurationen sollte man allerdings besser das offizielle OpenWrt-Wiki zu Rate ziehen.
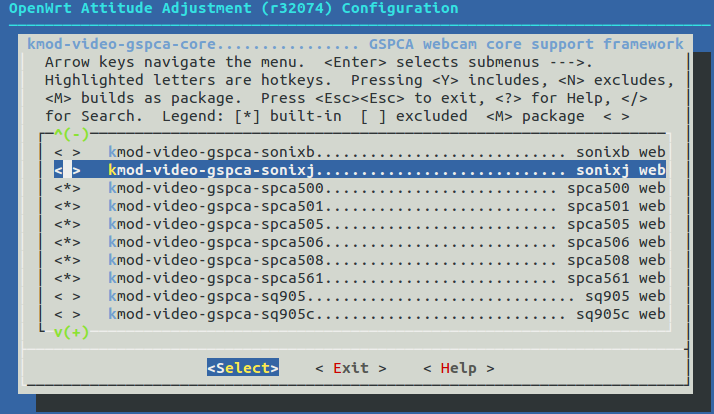
Für die Videounterstützung fehlten die notwendigen Kernelmodule sowie Kameratreiber. Auch über das Paketmanagement und das Carambola-Repository ließ sich die Software nicht nachinstallieren, da sie schlicht nicht vorhanden waren. Das offizielle OpenWrt-Repository (für Ralink MIPS, ramips) ließ sich in diesem Fall nicht für Kernel-Module nutzen, da sich die jeweiligen Kernelversionen unterscheiden – die Module lassen sich zwar installieren, aber nicht vom Kernel laden.
Um die Bilder der Webcam ins Netzwerk zu streamen, bieten sich Tools wie mjpeg-streamer an. Leider fehlte auch dieses Paket in den Repos von Carambola. Bei den Anwendungen lässt sich jedoch in der Regel zwischen verschiedenen Quellen mischen, sofern die Versionen der Bibliotheken stimmen. Kurzerhand fügten wir das OpenWRT-Repository als Paketquelle in /etc/opkg.conf hinzu und konnten das Paket über
opkg update und opkg install mjpg-streamer nachinstallieren.
Fazit
Nichtsdestotrotz funkionierte die Lösung leidlich – mit selten Abstürzen und Kernel Panics ist jedoch zu rechnen. Nutzt man die GPIOs in Verbindung mit Kameras, ließen sich etwa Fahrzeuge aus der Ferne lenken. Denkbar sind auch Robotersteuerungen oder Telemetriesender. So hat etwa ein Quadrokopter-Bastler Carambola bereits erfolgreich zur Übertragung von Flugdaten zum Laptop eingesetzt.

