

Besser als die Natur: Hüpfroboter springt nahe am theoretischen Optimum
Ein Forschungsteam aus Kalifornien hat einen Hüpfroboter entwickelt, der sogar die Vorbilder aus der Natur überflügelt. Die diente aber als Inspiration.
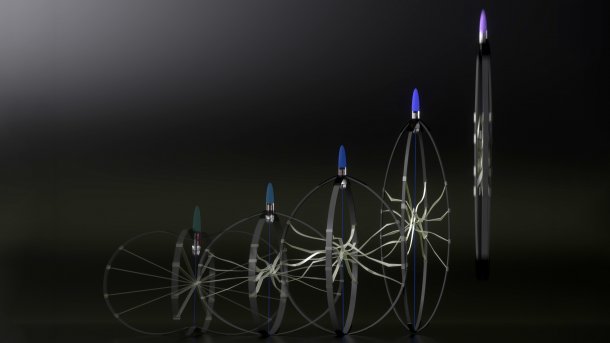
(Bild: Hawkes et.al)
Mit einer Höhe von 32,9 Metern ist ein selbst nur 30 Zentimeter großer und 30 Gramm schwerer Roboter höher gesprungen als jeder andere bisher gebaute Hüpfroboter – und übertrifft mit seiner Sprungkraft auch alle bekannten biologischen Springer. Die Konstrukteure haben sich beim Design von der Biologie inspirieren lassen, ohne deren Begrenzungen zu übernehmen.
Besser als mit Muskeln
Der Roboter, den das Forschungsteam um Elliot Hawkes (University of California, Santa Barbara) in der aktuellen Ausgabe der Zeitschrift Nature vorstellt, sieht aus wie eine Rakete, ist aber keine. Denn eine Rakete schleudert hinten Treibstoff heraus und ändert daher während des Fluges ihre Masse. Ein Sprung, so die Forscher, sei dagegen dadurch definiert, dass der Springer Kraft auf den Boden ausübt und seine eigene Masse nicht verändert. Auch der Flug eines Pfeils zählt daher nicht als Sprung, da die Kraft vom Bogen kommt, nicht vom Pfeil selbst.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes YouTube-Video (Google Ireland Limited) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (Google Ireland Limited) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Die Feder allerdings, in der die Energie für den Sprung des Robotoers zunächst gespeichert wird, erinnert entfernt an Flitzebögen: Vier Bögen aus Kohlefaser sind durch dehnbare Sehnen miteinander verbunden. Diese Feder wird gespannt, indem die Bögen zusammengepresst und zugleich die Sehnen gedehnt werden. Das Prinzip, die in einer Feder gespeicherte Kraft zu nutzen, haben sich Hawkes und seine Kollegen von Tieren wie dem Floh oder der Heuschrecke abgeschaut. Während Muskeln umso mehr Kraft aufbauen können, je langsamer sie sich zusammenziehen, kann die Feder diese gesammelte Kraft in einem sehr kurzen Moment freisetzen und dadurch größere Sprünge ermöglichen, als es bei direktem Muskeleinsatz möglich wäre.
Bei Lebewesen ist die Energie, die sich auf diese Weise in einer Feder akkumulieren lässt, dadurch begrenzt, dass sich der Muskel nur einmal zusammenziehen lässt. Im Unterschied dazu können die Motoren von Robotern so lange laufen, bis die Speicherkapazität der Feder ihr Maximum erreicht hat. Zudem haben die Forscher die Feder ihres Roboters so konstruiert, dass sie nach dem Entladen (das innerhalb von neun Millisekunden erfolgt) eine schmale, aerodynamisch günstige Form annimmt.
Nahe am möglichen Optimum
Aufgrund von Modellrechnungen nehmen Hawkes und Kollegen an, sich mit ihrem Roboter nahe der optimalen Sprunghöhe zu bewegen, die mit Elektromotoren und den derzeit verfügbaren Materialien erreichbar ist. Roboter mit solcher Sprungkraft könnten Hindernisse überwinden, für die sonst fliegende Roboter erforderlich wären, und sich während des Sprungs einen Überblick über das Gelände verschaffen. Auf dem Mond ließen sich mit ihrem Roboter sogar Höhen bis zu 125 Meter erreichen, sodass mit einem einzigen Sprung Entfernungen bis zu 500 Metern überwunden werden könnten.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes YouTube-Video (Google Ireland Limited) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (Google Ireland Limited) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.


(mho)
