Transistor-Bot auf Breadboard
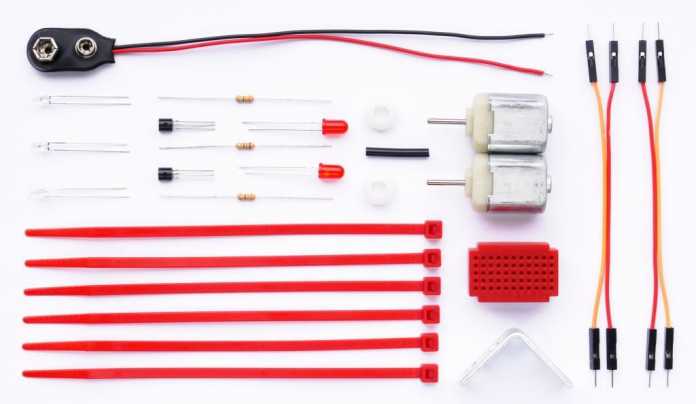
In der Make 3/16 haben wir beschrieben, wie man aus wenigen Bauteilen einen einfachen helligkeitsgesteuerten Roboter zusammenlöten kann. Nun gehen wir einen Schritt weiter: Wir integrieren einen dritten Fototransistor - durch die neue Bauweise können wir die Schaltung variieren und die Sensoren unterschiedlich ausrichten.
Anstatt die elektronischen Bauteile direkt an die Motoren zu löten, benutzen wir für unsere minimalistische Steuerung ein kleines Breadboard. Unser kleiner Roboter kann nun noch schneller und mit entsprechenden Motoren ganz ohne Löten aufgebaut werden. Wir wollen uns nun vier Schaltungsvarianten mit acht unterschiedlichen Funktionen im Detail ansehen.
Der Aufbau
Der mechanische Aufbau des hier beschriebenen MiniBots zum Stecken und des kleinen Roboters zum Löten aus der Make 3/16 [1] ist nahezu identisch. Daher gehen wir diesbezüglich hier nur auf die beiden neuen Komponenten näher ein: Das sind die Motoren und das Breadboard als Plattform für unsere variable Steuerung.

Die Motoren
Damit unser MiniBot gut regelbar und nicht zu schnell unterwegs ist, benötigen wir wieder langsam drehende Motoren, deren Geschwindigkeit bei 8,25 V etwa 3.000 U/min betragen soll. Weil Motoren mit einer solch niedrigen Nenndrehzahl ohne Getriebe schwierig zu bekommen sind, bietet es sich an, einen Motor mit höherer Nennspannung zu verwenden, der dann bei 8,25 V entsprechend langsamer dreht. Umgekehrt soll sich unser Bot aber schon bei kleinen Spannungen in Bewegung setzen. Die Nennspannung der Motoren sollte also so hoch wie möglich, die Anlaufspannung jedoch so gering wie möglich sein.
Pollin bietet für wenig Geld den Gleichstrommotor Johnson NF143G-10428 an, der von 3 V bis 24 V betrieben werden kann und eine Leerlauf-Drehzahl von 8.597 U/min aufweist. Rechnet man diese von 24 V auf 8,25 V herunter, so ergibt sich eine entsprechende Leerlaufdrehzahl von 2.955 U/min beziehungsweise 49 U/sec. Mit einem Schlauch mit 3 mm Außendurchmesser auf der Motorachse erhalten wir eine maximale Fahrgeschwindigkeit von n · d · π = 49 · 3 · 3,14 = 462 mm/sec. Die abgeflachte Gehäuseform dieser Motoren eignet sich zudem auch bestens, um sie wie gehabt mit Kabelbindern an einen Metallwinkel (25 mm x 25 mm) zu montieren.
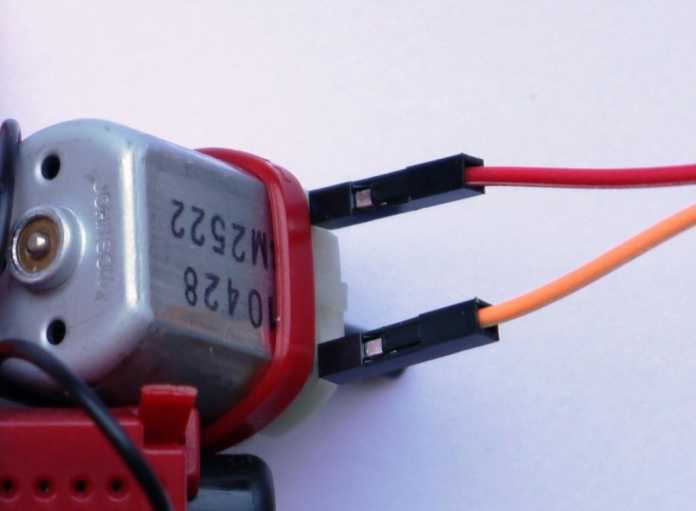
Die Steckanschlüsse des Motors sind für 3 mm x 0,5 mm Flachstecker ausgelegt, sie lassen sich aber auch gut mit üblichen Jumperkabeln für Breadboards verwenden, die man meist als 40-poliges Flachbandkabel bekommt. Die ideale Kabellänge für uns beträgt 10 cm. Der Querschnitt (männlicher) Stecker hat 0,5 mm x 0,5 mm. Man muss lediglich darauf achten, die Pins so in die Buchsen der Motoren zu stecken, dass die kleine seitliche Öffnung im Stecker jeweils nach oben (oder unten) gerichtet ist, damit sich die Pins gut in die Buchsen stecken lassen und dabei nicht umknicken. Damit unser MiniBot vorwärts fährt, müssen die hinteren Anschlüsse der Johnson-Motoren mit + (rotes Kabel im Bild) und die vorderen mit - belegt werden.
Die Steuerplattform
Die Steuerplattform
Für den Aufbau unserer einfachen Steuerschaltung verwenden wir ein kleines Breadboard (30 mm x 20 mm) mit 55 Steckplätzen (11 x 5). Die fünf in Reihe liegenden Kontakte sind jeweils untereinander verbunden.Oft werden auch Boards mit 17 x 10 Steckplätzen angeboten.
Das Breadboard kann entweder mit Doppelklebeband (vielfach schon auf der Unterseite vorhanden) oder mit Kabelbindern an der Batterie befestigt werden. Aus dem Ende des nach vorne abstehenden Kabelbinders formen wir wieder eine Kufe, auf der unser Minibot dahingleiten kann. Wir positionieren das Breadboard so zwischen den abstehenden Enden des linken und rechten Kabelbinders, dass sich die Beschriftung am Board (1 bis 9) vorne befindet. Dann nämlich lassen sich die Positionen der Bauteile später direkt am Schaltplan ablesen.

Die äußeren beiden Kontaktleisten des Breadboards verwenden wir für die Stromversorgung der Schaltung. Entsprechend der Abbildung stecken wir das rote Kabel des Batterieclips (+) in den mittleren der ganz linken Kontakte und das schwarze Kabel (-) in den mittleren der ganz rechten Kontakte. Für die Motoranschlüsse bietet es sich an, die hinterste und für die Transistoren und den 150 Ω Widerstand die zweitletzte Reihe zu benutzen. Die beiden 5-mm-LEDs können wir in der mittleren Reihe platzieren, sodass vorne noch ausreichend Platz für die Sensoren bleibt. Wie gehabt können wir diese wieder mit Kabelschellen (Ø 4-7 mm) aufpeppen. Alternativ lassen sich aber auch weiße LED-Fassungen oder Durchgangstüllen aus Gummi (Ø 5 mm) aufstecken. Die genaue Position der einzelnen Bauteile auf dem Board wird später in den jeweiligen Schaltplänen zu sehen sein.

Vier Schaltungen mit acht Funktionen
Die drei Grundschaltungen mit Transistoren sind die Kollektor-, die Emitter- und die Basisschaltung. Beim Roboter zum Löten hatten wir eine einfache Variante der Emitterschaltung verwendet, die wir später wieder für die Schaltungsvarianten 3 und 4 nutzen werden. Dabei liegt der Emitter an einer konstanten Spannung und zwar beim NPN-Transistor auf "-" und beim PNP-Transistor auf "+". Für die ersten beiden Schaltungen verwenden wir zunächst aber die Kollektorschaltung. Dabei liegt jeweils der Kollektor an einer festen Spannung (beim NPN-Transistor auf „+“ und beim PNP-Transistor auf „–“).

Unser MiniBot zum Löten hatte zwei Fototransistoren für seine Navigation benutzt. Durch die Verschaltung der Sensoren (S1 und S2) gab es nur ein Steuersignal für beide Motoren. Nun werden wir zwischen diese beiden Sensoren einen dritten Sensor (S3) integrieren. Dadurch erhalten wir für jeden Transistor bzw. Motor ein separates Steuersignal, sodass beide Motoren gleichzeitig ihre Geschwindigkeit reduzieren und gegebenenfalls auch stehen bleiben können.
Die Kollektorschaltung
Die Kollektorschaltung
Im Schaltbild sehen wir die erste der beiden Kollektorschaltungen, die ohne Basis-Vorwiderstände auskommen, um die Spannung an den Motoren zu regeln. Die an den Sensoren abfallenden Spannungen U1, U2 und U3 sind umgekehrt proportional zur Beleuchtung der entsprechenden Sensoren. Bei einer Versorgungsspannung von 9 V und exakt gleicher Beleuchtung aller drei Sensoren würde sich für U1 = U2 = U3 = 3 V ergeben. An der Basis der Transistoren liegt dann jeweils eine Spannung von 6 V bezogen auf die Emitterseite (beim NPN-Transistor U2 + U3 und beim PNP-Transistor U1 + U3). Die Transistoren steuern nun so durch, dass sich am Emitter und somit an den Motoren eine Spannung von etwa 6 V - 1,4 V = 4,6 V einstellt. Die Motoren drehen in diesem Fall also beide mit etwa der halben Geschwindigkeit. Wird es nun zum Beispiel beim rechten Sensor (S1) heller, so verringert sich U1 wodurch sich U2 + U3 erhöht. Das Potential wandert am Emitter des BC517 entsprechend nach oben und am Emitter des BC516 nach unten. Dadurch wird der linke Motor M2 schneller und der rechte Motor M1 langsamer. Bei viel Licht auf den mittleren Sensor S3 hingegen geht U3 gegen 0 V und für U1 und U2 ergibt sich jeweils die halbe Betriebsspannung von 4,5 V. Die Motoren laufen dann langsam mit etwa 4,5 V - 1,4 V = 3,1 V.

Die beiden LEDs L1 und L2 sind wieder mit einem geeigneten Vorwiderstand R3 zwischen die Transistoren geschaltet, sodass diese dann leuchten, wenn beide Transistoren durchschalten und entsprechend beide Motoren laufen.

Je nachdem wie der rechte und der linke Motor angeschlossen wird, ergeben sich zwei verschiedene Schaltungsvarianten. Für jede dieser Varianten betrachten wir wiederum zwei Funktionen, die sich durch unterschiedliches Ausrichten der Sensoren ergeben.
Parcoursfahrer mit Hinderniserkennung
Der Schaltplan ist so gestaltet, dass die mit den Ziffern markierten Positionen der Bauteile mit der Anordnung am Bread-Board übereinstimmen. Der NPN-Transistor BC517 kommt demnach also in die Reihen +/1/2 und BC516 in die Reihen 8/9/-. Da die Pinbelegung der Transistoren je nach Hersteller variieren kann, müssen wir uns bezüglich der Einbaurichtung wieder am jeweiligen Datenblatt orientieren. Der hintere Anschluss des rechten Motors (M1) kommt auf + und der vordere auf 8. Der hintere Anschluss des linken Motors (M2) kommt auf 2 und der vordere auf -. Schließlich stecken wir noch den Widerstand R3 zwischen die Reihen 3 und 7 und die beiden LEDs nach vorne gerichtet in die Reihen 2/3 beziehungsweise 7/8.
Bremst an engen Stellen und beschleunigt, wenn er verfolgt wird
Die Sensoren S1 und S2 setzen wir an den vorderen Ecken des Breadboards 45° zur Seite gerichtet an die Postionenen +/1 und 9/-. Den mittleren Sensor S3 stecken wir bei dieser Variante ganz hinten zwischen den Motoranschlüssen mit dem kürzeren Beinchen (Abflachung am Gehäuse) in die 1. und mit dem längeren Beinchen in die 9. Reihe und richten ihn nach hinten aus.
Wenn wir nun unseren MiniBot in Betrieb nehmen, können wir auf einem hellen Untergrund und bei ausreichend starker Beleuchtung testen, wie er auf Helligkeitsunterschiede und Hindernisse reagiert. Die Neigung der Sensoren zum Boden hin hat dabei einen wesentlichen Einfluss. Je mehr diese nach unten zeigen, desto näher fährt er an eine seitliche Begrenzung heran und desto zuverlässiger erkennt er schmale Markierungen am Boden, die man beispielsweise mit einem schwarzen Isolierband aufkleben kann. Für einen Parcours können wir aber auch schwarze Papierstreifen oder dunkle Hindernisse verwenden.
Je nach dem Verhältnis der Helligkeit auf die vorderen Sensoren (S1 und S2) und den hinteren Sensor (S3) variiert der Parcoursfahrer seine Geschwindigkeit. Das hat zur Folge, dass er bei schmalen Etappen tendenziell langsamer wird (S1 und S2 dunkler als S3) und umgekehrt seine Geschwindigkeit erhöht, wenn sein hinterer Sensor zum Beispiel durch einen Verfolger abgedunkelt wird.
Flüchtet bei Gefahr von oben
Richten wir den mittleren Sensor S3 nach oben anstatt nach hinten aus, so fällt auf diesen nun mehr Licht. Bei waagerecht ausgerichteten Sensoren S1 und S2 wird er demnach mit gemütlichem Tempo durch die Gegend fahren und Hindernissen bereits frühzeitig ausweichen. Entdeckt er dabei vor sich eine Lichtquelle (Beute), so erhöht er sein Tempo und rast auf das Licht zu.
Wird jedoch der Sensor S3 von oben abgeschattet, so interpretiert er das als Bedrohung und flüchtet so schnell er kann. (Schließlich kann man nicht wissen, ob es Greifvögel nicht auch auf kleine bunte Roboter abgesehen haben.) Je näher der Angreifer kommt, desto unvorsichtiger wird unser MiniBot und tendiert dann verstärkt dazu, Gegenstände vor sich nicht zu bemerken und mit ihnen zu kollidieren. Das passiert dann, wenn die Abschattung des Sensores S3 stärker ist, als die von S1 oder S2 durch das Hindernis, sprich wenn U3 deutlich größer ist, als U1 bzw. U2.
Was passiert, wenn wir S3 nach vorne richten? Unser MiniBot wird sich dann zwar immer noch von (dunklen) Gegenständen abwenden, befindet sich etwas aber genau vor ihm, so kann es passieren, dass er plötzlich zum „Angriff“ übergeht und auf das Objekt zurast. Einzig eine unterschiedliche Ausrichtung eines Sensors führt also einmal zu einem Flucht- und einmal zu einem Angriffsverhalten. Die beiden Eigenschaften könnten wir auch kombinieren, indem wir zugleich vorne und hinten einen Sensor integrieren und diese miteinander in Reihe schalten.
Linienfolger oder Aufräumer
Linienfolger oder Aufräumer
Bei der ersten Schaltung wurden die Motoren so angesteuert, dass unser Bot Hellem gefolgt ist. Für den Linienfolger kehren wir das Verhalten nun um, indem wir die Anschlüsse des linken mit denen des rechten Motors tauschen, sodass der rechte Transistor den rechten Motor und der linke Transistor den linken Motor ansteuert.
Erkennt die Breite einer Linie
Am einfachsten ist es, eine Linie mit einem schwarzen Isolierband aufzukleben. Ein solches ist flexibel genug, um auch Kurven legen zu können. Wichtig dabei ist ein heller Untergrund. Damit die Sensoren nicht von der Beleuchtung beeinflusst werden, sollte sich diese möglichst direkt über unserer Versuchsanordnung befinden.

Für den Linienfolger richten wir nun alle drei Sensoren parallel nach vorne und schräg zum Boden hin aus. Je weiter die Sensoren zum Boden hin geneigt sind, desto schärfer reagiert er auf die Linie aber desto weniger vorausschauend navigiert er. Mit dem Abstand zwischen den äußeren Sensoren S1 und S2 können wir die Genauigkeit justieren, mit der er auf der Linie fährt. Sind sie zu knapp an der Linie, so ist der Linienfolger permanent am Ausregeln und tendiert dazu, beim Fahren hin und her zu schwingen. Es ist also empfehlenswert, die äußeren Sensoren etwas neben die Linie zu richten, sodass es einen gewissen Bereich um die Mitte der Linie gibt, in dem beide Motoren mit derselben Geschwindigkeit drehen.

Der Sensor S3 ist bei geraden Strecken direkt auf die Linie gerichtet. Bei ausreichender Linienbreite und ausreichendem Abstand zwischen linkem und rechtem Sensor ist der Kontrast stark genug, damit U3 ansteigt und der Linienfolger seine Geschwindigkeit erhöht. Bei starken Kurven, Abzweigungen oder gekreuzten Linien wird er hingegen sein Tempo vorübergehend drosseln. Das wird er auch dann machen, wenn er gar keine Linie unter sich hat und erst eine aufspüren muss. Wir können diesbezüglich mit unterschiedlichen Neigungswinkeln der drei Sensoren experimentieren, um damit den Schwellwert zu variieren, bei dem der Linienfolger seine Geschwindigkeit ändert. Und schließlich haben wir auch hier wieder die Option, den mittleren Sensor nach hinten zu richten, sodass mehrere Bots auf einer Linie fahren können und dabei über den hinteren Sensor S3 den Abstand zueinander regeln.
Unterscheidet die Größe von Bausteinen
Ebenso wie eine schwarze Linie stellt auch ein Gegenstand auf hellem Untergrund einen Kontrast dar, weil senkrecht einfallendes Licht am waagerechten Boden besser reflektiert wird, als an den vertikalen Seiten eines Objektes. Je nachdem welcher der drei Sensoren von einem Objekt abgeschattet wird, ändert unser MiniBot seine Richtung oder Geschwindigkeit.
Wir können nun ausgehend von der zuvor beschriebenen Schaltung testen, wie unser Schieberoboter auf unterschiedliche Gegenstände, wie beispielsweise verschieden große Bausteine reagiert. Dabei müssen wir unter Umständen lediglich die Orientierung der einzelnen Sensoren anpassen. Die seitliche Ausrichtung der Sensoren S1 und S2 und der Neigungswinkel von S3 kann dabei so an die Größe der Gegenstände angepasst werden, dass unser Aufräum-Bot die gewünschten Objekte präzise geradeaus schiebt und seine Geschwindigkeit in Abhängigkeit von ihrer Größe variiert. Je nachdem, ob er nämlich einen kleinen Baustein (S3 dunkler als S1 und S2) oder einen größeren Baustein (S1, S2 und S3 dunkel) vor sich hat, erledigt er seine Aufräumarbeit mit unterschiedlicher Geschwindigkeit. Und ist er beispielsweise dabei, einen kleinen Baustein in eine herumliegende Ansammlung von Bausteinen zu schieben, so werden die äußeren Sensoren ebenso abgedunkelt, weshalb er langsamer wird und sich eventuell für einen neuen Baustein entscheidet, den er weiterschieben möchte.
Die Emitterschaltung
Die Emitterschaltung
Ausgehend von der Kollektorschaltung haben wir nun den Platz der Transistoren getauscht. Weil der Emitter fix an 0 V beziehungsweise 9 V liegt, kann die Motorspannung nicht wie bei der Kollektorschaltung über die Basisspannung geregelt werden. Übersteigt UBE 1,4 V, so schalten die Transistoren voll durch, die Motoren erhalten die volle Spannung und drehen mit maximaler Geschwindigkeit. Mit Hilfe der Basis-Vorwiderstände R1 und R2 können die Motoren jedoch über deren Stromfluss geregelt werden. Dafür wählen wir die Widerstände so, dass die Motoren erst ab einer Spannung von U1 oder U2 > 4,5 V (U3 = 0 V) die volle Leistung erreichen. In der Make 3/16 haben wir das bereits näher analysiert. Der einzig wesentliche Unterschied ist nun der dritte Sensor S3. Durch ihn können beide Motoren gleichzeitig langsam drehen und bei Spannungen unter 1,4 V für U1 oder U2 auch zum Stillstand kommen.
Auch die beiden LEDs haben wir bei den Emitterschaltungen anders integriert. Diese sind nun nicht mehr in Serie zwischen die beiden Transistoren geschaltet, sondern jeweils in Reihe mit einem der Motoren. Daher können die beiden LEDs nun unabhängig voneinander angehen. Die Motoren bestimmen dabei den Strom durch die LEDs, weshalb diese Schaltungsvariante nur für Motoren mit einem Leerlaufstrom von 10 bis 20 mA empfehlenswert ist. Zudem wird natürlich die Geschwindigkeit der Motoren um die Spannung an den LEDs reduziert. Bei blauen und weißen LEDs sind das in der Regel etwa 3 V und bei allen andern Farben ca. 2 V. Verwenden wir blaue LEDs und rechnen wir mit einer Sättigungsspannung am Transistor von etwa UCE = 0,75 V, so bleiben für den Motor also noch etwa 9 - 3 - 0,75 = 5,25 V.
Wir betrachten nun wieder zwei Schaltungsvarianten mit vier Funktionen, die sich durch unterschiedliches Anschließen der Motoren und verschiedenes Ausrichten der Sensoren ergeben.
Verfolger
Verfolger
Bei der Emitterschaltung platzieren wir nun den PNP-Transistor BC516 in die Reihen +/1/2 und den NPN-Transistor BC517 in die Reihen 8/9/- . Die Motoren schließen wir so an, dass sie jeweils in Serie mit einer der LEDs liegen. Im Unterschied zur ersten Kollektorschaltung verbinden wir demnach den vorderen Anschluss des rechten Motors M1 mit Reihe 7 und den hinteren Anschluss des linken Motors M2 mit Reihe 3. Die beiden LEDs bleiben in den Reihen 2/3 und 7/8.
Folgt Objekten in bestimmtem Abstand
Bei der Kollektorschaltung hat ein Abdunkeln des mittleren Sensors S3 bewirkt, dass U3 größer wird und unser MiniBot beschleunigt. Bei der Emitterschaltung hingegen, werden die Motoren in diesem Fall langsamer und bleiben bei einer großen Spannung U3 sogar stehen. Dann ist nämlich U1 < 1,4 V als auch U2 < 1,4 V und somit an beiden Transistoren UBE < 1,4 V. Das eröffnet nun ganz neue Verhaltenmuster für den kleinen Roboter.

Damit der Verfolger-Bot bei einigermaßen gleichmäßiger Beleuchtung aller drei Sensoren nicht ungewollt zum Stillstand kommt, legen wir die Sensoren zunächst noch direkt (ohne Vorwiderstand R1 bzw. R2) an die Basisanschlüsse der Transistoren. Die seitlichen Sensoren S1 und S2 richten wir etwa 45° zur Seite und den mittleren Sensor S3 waagerecht nach vorne.

Wir können nun testen, ob der MiniBot einem dunklen Objekt oder einer Hand folgen und in gewissem Abstand davor stehen bleiben kann. Mit dem Neigungswinkel des Sensors S3 können wir dabei den Abstand zum verfolgten Objekt einstellen. Je weiter S3 zum Boden geneigt wird, desto später wird er ein Objekt vor sich detektieren und davor stehen bleiben.
Folgt einem Schatten über sich
Für die folgenden Funktionen ist es vorteilhaft, wenn die Motoren mit unterschiedlicher Geschwindigkeit laufen können und diese nicht zu sprunghaft wechseln. Dazu integrieren wir nun einen hochohmigen Basis-Vorwiderstand R1 zwischen die Reihen 1 und 4 und R2 zwischen die Reihen 6 und 9. Die Berechnung der entsprechenden Widerstandswerte haben wir bereits im letzten Artikel erläutert. Die entsprechenden Anschlüsse der Sensoren wechseln wir nun von Reihe 1 auf 4 und von Reihe 9 auf 6.
Bei dieser Variante richten wir alle drei Sensoren nach oben. S1 und S2 sind dabei etwas schräg zur Seite und nach vorne orientiert. Dabei müssen wir darauf achten, dass es zwischen den Anschlüssen der LEDs und der Sensoren zu keinem Kurzschluss kommt.
Um den Schattenfolger gut navigieren zu können, benötigen wir nun wieder einen Platz unter einer Lampe. Wird S1 oder S2 abgeschattet, so dreht er sich in die entsprechende Richtung zum Schatten hin. Werden S1 und S2 zugleich abgeschattet, so wird er dem Schatten über sich so lange folgen, bis S3 mehr abgedunkelt ist als S1 und S2. Sind die Sensoren passend eingestellt, so sollte der Bot also einer Hand über sich folgen und genau unter ihr stehen bleiben können.
Die LEDs können nun bereits angehen noch bevor der Strom hoch genug ist, damit der entsprechende Motor beginnt, sich in Bewegung zu setzen. Wir können also bereits am Aufleuchten der LED-Augen erkennen, wenn der Schattenfolger kurz davor ist loszufahren.
Lichtfolger
Lichtfolger
Um aus dem Schattenfolger einen Lichtfolger zu machen, tauschen wir nun wieder die Anschlüsse des rechten und linken Motors. Durch unterschiedliches Ausrichten der Sensoren bietet diese Schaltung wieder mehrere interessante Möglichkeiten.
Folgt einem Licht in bestimmtem Abstand
Bereits der Parcoursfahrer war imstande, einem Licht hinterherzufahren. Mit der Kollektorschaltung war es ihm allerdings nicht möglich, einen bestimmten Abstand zur Lichtquelle einzuhalten. Wie gerade eben der Schattenfolger wird nun auch der Lichtfolger dann stehenbleiben, wenn auf S1 und S2 mehr Licht fällt als auf S3. Um dies zu erreichen, müssen die Sensoren S1 und S2 bei einem frontalen Licht gleichzeitig heller beleuchtet werden als S3. Wir richten dazu S1 und S2 nach vorne und nur geringfügig zur Seite hin aus. Den Sensor S3 richten wir hingegen nach oben. Je mehr Licht auf S1 und S2 und je weniger auf S3 trifft, umso früher kommt der Lichtfolger zum Stillstand. Dieses Verhältnis lässt sich sowohl durch die Richtung von S1 und S2 als auch durch die Neigung von S3 einstellen. Je mehr wir S3 nach vorne richten, umso näher wird er sich einem frontalen Licht annähern. Um einen möglichst starken Kontrast zu erzielen, sollte die allgemeine Beleuchtung bei diesem Versuch nicht zu stark sein.

Der Lichtfolger kann nun entweder mit einer vorgehaltenen Lampe oder mit einem starken Lichtstrahl gesteuert werden, der vor dem Roboter auf den Boden gerichtet wird. Im zweiten Fall macht es Sinn S1 und S2 geringfügig zum Boden hin auszurichten. Ist der Untergrund nicht zu hell gewählt, so kann er aber auch einem hellem Blatt Papier folgen, wenn es so gehalten wird, dass Licht darauf fällt. Bei genügend Kontrast sollte er in allen drei Fällen vor dem Licht stehen bleiben. Im umgekehrten Fall bleibt er aber auch dann stehen, wenn wir ihn von oben (S3) abschatten.

Kreist oder verharrt unterhalb einer Lampe
Bezüglich einer Lichtquelle über unserem Roboter, bietet die Schaltung noch zwei weitere Möglichkeiten, wenn wir die Neigung der Sensoren entsprechend abändern. Ähnlich wie beim Schattenfolger zeigen nun alle drei Sensoren nach oben, sodass die Richtung einer Lampe möglichst gut ermittelt werden kann. Hierbei werden jedoch die seitlichen Sensoren leicht nach hinten und der mittlere Sensor schräg nach vorne gerichtet. Steht S3 genügend weit nach vorne, so folgt dieser Lichtfolger nun einer Lampe über ihm und kommt unter ihr zum Stillstand. Er mag es also richtig hell. Versucht man ihn von oben abzuschatten, so sucht er den schnellsten Weg zurück ins Licht.
Steht S3 hingegen eher senkrecht nach oben, so wird U3 nie so groß werden, dass der Lichtfolger zum Stillstand kommt. Er wird dann unterhalb einer Lampe pausenlos seine Kreise ziehen. Den Bewegungsradius können wir dabei über die Ausrichtung der Sensoren einstellen. Je weiter wir z.B. den mittleren Sensors S3 nach vorne richten, desto weniger Licht trifft auf ihn. Das hat zur Folge, dass der Lichtfolger früher seine Richtung wechselt und sich weniger weit von der Lichtquelle über ihm entfernt.
Weitere Informationen und Videos zum Projekt sind auf variobot.com [2] zu finden. Die Teile für den MiniBot „mibo“ sowie für die Lötversion „T2-R2“ sind hier als kompletter Bausatz in verschiedenen Farben erhältlich. (fls [3])
URL dieses Artikels:
https://www.heise.de/-3283594
Links in diesem Artikel:
[1] http://www.heise.de/make/inhalt/2016/3/50/
[2] http://www.variobot.com/
[3] mailto:fls@make-magazin.de
Copyright © 2016 Heise Medien