

Transistor-Bot auf Breadboard
In der Make 3/16 haben wir beschrieben, wie man aus wenigen Bauteilen einen einfachen helligkeitsgesteuerten Roboter zusammenlöten kann. Nun gehen wir einen Schritt weiter: Wir integrieren einen dritten Fototransistor - durch die neue Bauweise können wir die Schaltung variieren und die Sensoren unterschiedlich ausrichten.
- Tino Werner
Anstatt die elektronischen Bauteile direkt an die Motoren zu löten, benutzen wir für unsere minimalistische Steuerung ein kleines Breadboard. Unser kleiner Roboter kann nun noch schneller und mit entsprechenden Motoren ganz ohne Löten aufgebaut werden. Wir wollen uns nun vier Schaltungsvarianten mit acht unterschiedlichen Funktionen im Detail ansehen.
Der Aufbau
Der mechanische Aufbau des hier beschriebenen MiniBots zum Stecken und des kleinen Roboters zum Löten aus der Make 3/16 ist nahezu identisch. Daher gehen wir diesbezüglich hier nur auf die beiden neuen Komponenten näher ein: Das sind die Motoren und das Breadboard als Plattform für unsere variable Steuerung.

Die Motoren
Damit unser MiniBot gut regelbar und nicht zu schnell unterwegs ist, benötigen wir wieder langsam drehende Motoren, deren Geschwindigkeit bei 8,25 V etwa 3.000 U/min betragen soll. Weil Motoren mit einer solch niedrigen Nenndrehzahl ohne Getriebe schwierig zu bekommen sind, bietet es sich an, einen Motor mit höherer Nennspannung zu verwenden, der dann bei 8,25 V entsprechend langsamer dreht. Umgekehrt soll sich unser Bot aber schon bei kleinen Spannungen in Bewegung setzen. Die Nennspannung der Motoren sollte also so hoch wie möglich, die Anlaufspannung jedoch so gering wie möglich sein.
Pollin bietet für wenig Geld den Gleichstrommotor Johnson NF143G-10428 an, der von 3 V bis 24 V betrieben werden kann und eine Leerlauf-Drehzahl von 8.597 U/min aufweist. Rechnet man diese von 24 V auf 8,25 V herunter, so ergibt sich eine entsprechende Leerlaufdrehzahl von 2.955 U/min beziehungsweise 49 U/sec. Mit einem Schlauch mit 3 mm Außendurchmesser auf der Motorachse erhalten wir eine maximale Fahrgeschwindigkeit von n · d · π = 49 · 3 · 3,14 = 462 mm/sec. Die abgeflachte Gehäuseform dieser Motoren eignet sich zudem auch bestens, um sie wie gehabt mit Kabelbindern an einen Metallwinkel (25 mm x 25 mm) zu montieren.
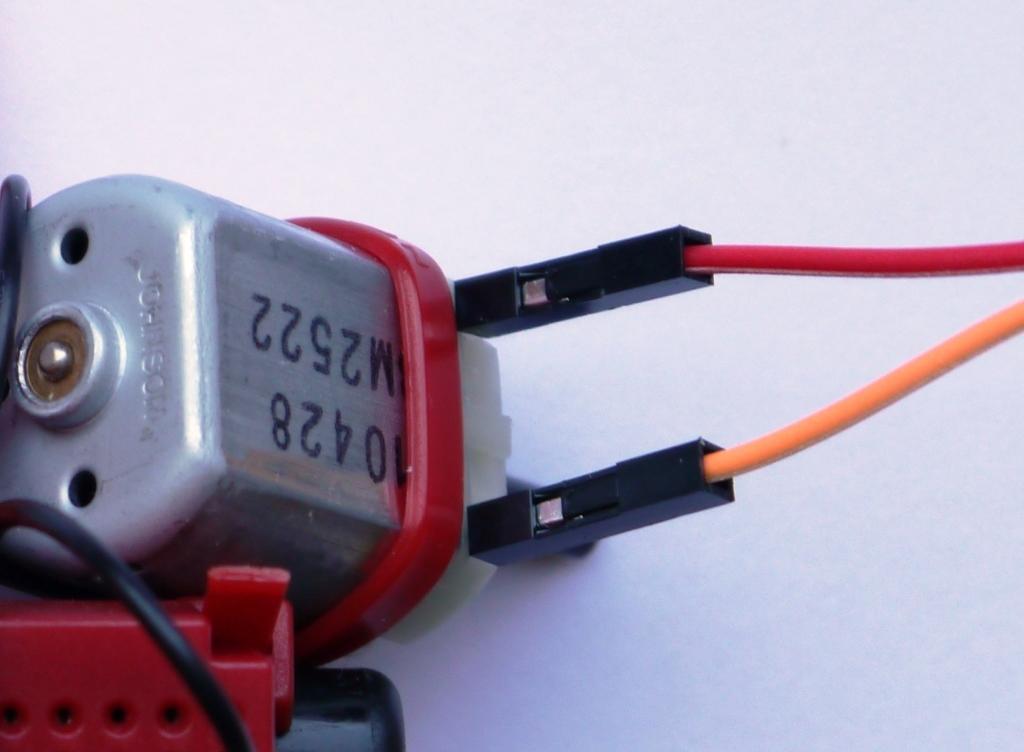
Die Steckanschlüsse des Motors sind für 3 mm x 0,5 mm Flachstecker ausgelegt, sie lassen sich aber auch gut mit üblichen Jumperkabeln für Breadboards verwenden, die man meist als 40-poliges Flachbandkabel bekommt. Die ideale Kabellänge für uns beträgt 10 cm. Der Querschnitt (männlicher) Stecker hat 0,5 mm x 0,5 mm. Man muss lediglich darauf achten, die Pins so in die Buchsen der Motoren zu stecken, dass die kleine seitliche Öffnung im Stecker jeweils nach oben (oder unten) gerichtet ist, damit sich die Pins gut in die Buchsen stecken lassen und dabei nicht umknicken. Damit unser MiniBot vorwärts fährt, müssen die hinteren Anschlüsse der Johnson-Motoren mit + (rotes Kabel im Bild) und die vorderen mit - belegt werden.
