
Arduino findet durch Labyrinth
Wie schafft man es, sich nur mit Hilfe eines Arduinos und einfachen Bauteilen im Raum zu orientieren? Diese Frage stellten wir uns am Institut für Didaktik der Physik der Universität Münster und bauten einen möglichst einfachen Roboter, der mit verschiedenen Algorithmen aus Labyrinthen entkommen kann.

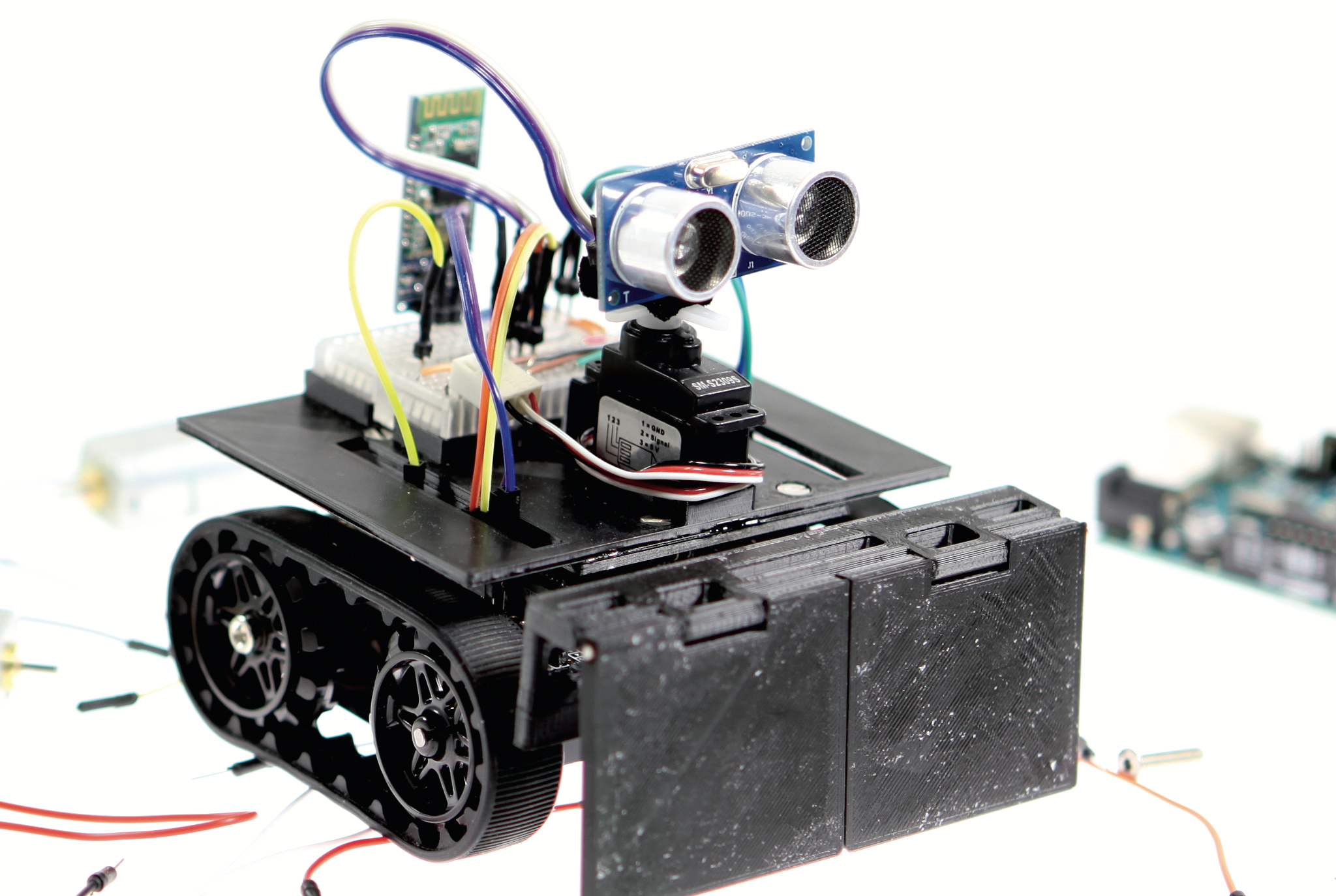
Unser Roboter soll als Beispiel für autonomes Fahren dienen und kostengünstig in Schulen nachgebaut und eingesetzt werden können. Deshalb besteht er aus dem sehr robusten Raupenfahrwerk des Pololu Zumo, welches sich relativ einfach zusammenbauen lässt und die weiteren Aufbauten trägt.
Die in Verbindung mit dem Bausatz empfohlenen Motoren erfüllen den Anspruch an eine hohe Fahrgenauigkeit, weshalb diese verwendet werden. Die Montage-Halterungen können einfach mit einem 3D-Drucker erzeugt werden. Die Tragfläche für die weiteren Komponenten wird genau auf die zusätzliche Ausrüstung angepasst und auf dem 3D-Drucker hergestellt. Sie besteht aus zwei einzelnen Elementen, die durch Klebeband und Schrauben verbunden sind. Die untere Platte weist Erhöhungen auf, um einen Abstand zum Arduino herzustellen. Die obere Platte besitzt Halterungen für einen Servomotor und ein Steckbrett, da wir erkannten, dass diese Bauteile sonst verrutschen können – trotz einer Befestigung mit Kleber. Außerdem ragt die Platte über den Arduino hinaus, sodass Aussparungen für die Buchsen nötig sind. Die 3D-Pläne und der Programmcode sind zum Download über den Link in der Kurzinfo verfügbar. Je nach Genauigkeit des Druckers muss eventuell an einigen Stellen ein wenig mit einer Feile nachgearbeitet werden.
