

Kleiner Schwimmroboter mit Flossenantrieb überwacht Umwelt und Reisfelder
Der Schwimmroboter der EPFL und des Max-Planck-Instituts ist klein, leicht und hat einen Flossenantrieb mit künstlichen Muskeln.
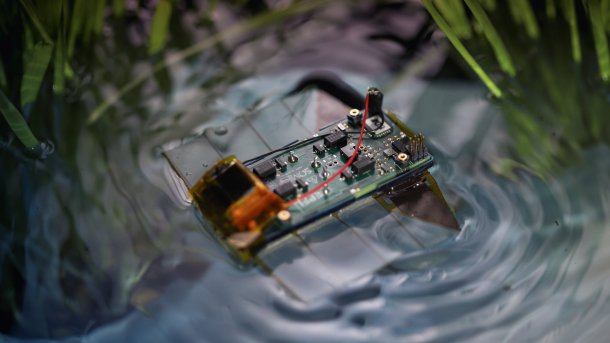
Der Schwimmroboter kann mit seinen Sensoren die Umwelt überwachen. Hier schwimmt er in einem simulierten Reisfeld.
(Bild: EPFL u. a.)
Die École Polytechnique Fédérale de Lausanne School of Engineering (EPFL) und das Max-Planck-Institut für Intelligente Systeme (MPI IS) haben gemeinsam einen Schwimmroboter zur Umweltüberwachung entwickelt, der mit Hochvolttechnik arbeitet. Er kann das Vielfache seines Eigengewichts tragen und bewegt sich energiearm fort.
Der Roboter ist kleiner als die Fläche einer Kreditkarte und wiegt lediglich 6 g, schreiben die Wissenschaftler in der Studie "Highly agile flat swimming robot", die in Science Robotics veröffentlicht ist. Er ist so geformt, dass er schwimmfähig ist und auf seiner Oberseite Lasten tragen kann, die ein höheres Gewicht haben als der Roboter selbst.
Flinke Flossen
Angetrieben wird der Roboter von einem geräuschlos arbeitenden Antrieb, der von maritimen Plattwürmern inspiriert ist. Er verwendet dünne, wellenförmige Flossen, um den Schwimmroboter anzutreiben. Auf einen Propellerantrieb haben die Wissenschaftler bewusst verzichtet. Zum einen ist ein solcher Antrieb leiser und zum anderen kann er energiearmer konzipiert werden, als es mit einem Antrieb der Fall ist, der einen Elektromotor benötigt. Außerdem bewegt sich der Roboter so auf eine natürlichere Weise und stört das Ökosystem weniger.
Seine Flossen schwingt der Roboter bis zu zehnmal schneller als sein natürliches Vorbild, die maritimen Plattwürmer. Damit erreicht er eine beachtliche Geschwindigkeit von 0,12 m/s. Das entspricht etwa 2,6 Körperlängen pro Sekunde. Als Antrieb nutzen die Forscher vier Muskeln nachempfundener Aktuatoren. Sie werden über ein sehr kompaktes elektronisches Steuersystem angesteuert.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes Video (TargetVideo GmbH) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (TargetVideo GmbH) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Die Aktuatoren erhalten eine Spannung von 500 V bei einer geringen Leistung von 500 mW. Zum Vergleich: Das ist lediglich ein Viertel der Leistung einer herkömmlichen elektrischen Zahnbürste. Die Wissenschaftler betonen, dass bei der Entwicklung des Systems darauf geachtet wurde, dass die Schaltkreise aufgrund der hohen Spannung komplett abgeschirmt sind und keine Gefahr für die Umgebung darstellen.
Um navigieren zu können, haben die Wissenschaftler dem Roboter einfache Lichtsensoren als eine Art Augen spendiert. Der Roboter kann so selbstständig Lichtquellen erkennen und ihnen folgen. Die Forscher probierten das mit Gummientchen aus, denen sie eine LED-Lampe umschnallten. Der Roboter folgte dann den Gummienten.
Für Umweltüberwachung und Landwirtschaft
Die Forscher sehen das Einsatzgebiet ihres Schwimmroboters vor allem in der Umweltüberwachung von Gewässern. Der Roboter sei in der Lage, auf engstem Raum exakt zu manövrieren, kann sich also vorwärts, rückwärts und seitwärts fortbewegen und auf der Stelle drehen. Als Nutzlast könnte er nach seinem spezifischen Einsatzzweck angepasste Sensoren mit sich führen. Denkbar sei auch, ihn in der Landwirtschaft zur Überwachung des Wachstums und der Gesundheit von Reispflanzen einzusetzen.
Videos by heise
Die Wissenschaftler arbeiten nun daran, die Laufzeit des Roboters zu verbessern. Zudem soll die Autonomie des Roboters erhöht werden.



(olb)