

Humanoider Roboter hebt mit Strahltriebwerk ab – KI macht es möglich
Der iRonCub3 mit Jet-Antrieb kann nun selbstständig schweben. Möglich macht es eine Steuerungskontrolle auf Basis Künstlicher Intelligenz.
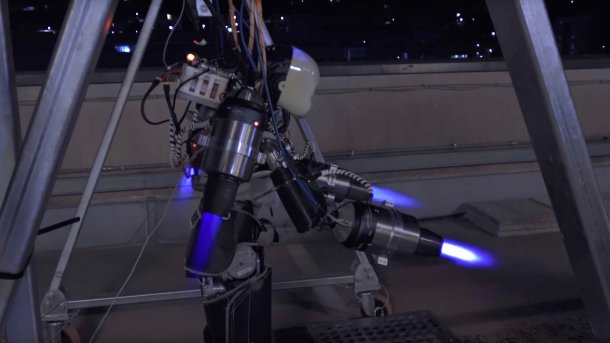
Der humanoide Roboter iRonCub3 will abheben.
(Bild: IIT (Screenshot))
Dem Italian Institute of Technology (IIT) ist es gelungen, seinen humanoiden Roboter iRonCub3 mit einem Jet-Antrieb frei schweben zu lassen. Nach mehreren Jahren Arbeit gelang den Forschern des IIT mithilfe von Künstlicher Intelligenz (KI) ein kontrollierter Schwebeflug.
Der iRonCub3 ist die dritte Iteration des humanoiden Roboters mit Jet-Antrieb. Die nun für den Testflug verwendete Version wurde nochmals verbessert, wie aus der Studie "Learning aerodynamics for the control of flying humanoid robots" hervorgeht, die in Communications Engineering erschienen ist.
Gleich geblieben ist, dass zwei Düsentriebwerke an den Armen und zwei weitere in einem Jetpack auf dem Rücken des Roboters angebracht sind. Sie entwickeln einen Schub von mehr als 1000 N, der den 70 kg schweren Roboter in die Luft heben kann. Die Wissenschaftler haben dem iCub3 angesichts dieser Schubkräfte eine stabilere und leichtere Wirbelsäule spendiert, die aus Titan gefertigt ist. Zum Schutz gegen die Hitze der Triebwerke, die bis zu 800 °C erreichen kann, hat der Roboter neue Hitzeschutzabdeckungen erhalten.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes YouTube-Video (Google Ireland Limited) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (Google Ireland Limited) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Die jetzige Konfiguration soll es dem iCub3 ermöglichen, sich im Schwebeflug zu halten und kontrollierte Flugmanöver durchzuführen. Das funktioniere auch bei Windböen und weniger guten Witterungsbedingungen, sagen die Forscher. Die Schwierigkeit ist, den Roboter in der Luft zu kontrollieren. Der Luftstrom der Turbinen strömt mit fast Schallgeschwindigkeit aus. Die Aerodynamik muss dabei in Echtzeit bestimmt und ausgewertet werden, um die Steuerungssysteme mit den Gelenkaktuatoren des Roboters korrekt ansprechen zu können.
"Das Testen dieser Roboter ist ebenso faszinierend wie gefährlich, und es gibt keinen Spielraum für Improvisation", sagt Daniele Pucci, einer der beteiligten Wissenschaftler des iCub-Projekts.
Die Schwierigkeit besteht darin, das dynamische Gleichgewicht des Roboters im Flug aufrechtzuerhalten. Das Problem dabei: Der Roboter hat eine längliche Form, ist unsymmetrisch, die Massen sind hauptsächlich auf bewegliche Gliedmaßen verteilt und der Schwerpunkt variabel. Das erschwert die Aufrechterhaltung der Aeordynamik erheblich.
Fliegen durch KI
Mittels Ergebnissen aus Untersuchungen im Windkanal und "Computational Fluid Dynamics"-Simulationen (CFD) konnten die Forscher KI-basierte Modelle entwickeln, die aerodynamische Kräfte in Echtzeit berechnen können.
Videos by heise
"Unsere Modelle umfassen neuronale Netze, die mit simulierten und experimentellen Daten trainiert wurden und in die Steuerungsarchitektur des Roboters integriert sind, um einen stabilen Flug zu gewährleisten", erklärt Antonello Paolino, Erstautor der Studie.
iRonCub3 wird dadurch in die Lage versetzt, bei verschiedenen Flugmanövern eine stabile Haltung einzunehmen. Dass das im Ansatz funktioniert, zeigten die IIT-Wissenschaftler bei einem Testflug. iRonCub wurde dazu mit einem Gestell frei beweglich verbunden, damit der Roboter bei einer Fehlfunktion nicht zu Schaden kommen kann. Dem Roboter gelang es, mit seinen beweglichen Strahltriebwerken abzuheben und in einen stabilen Schwebeflug überzugehen. Die erreichte Höhe betrug dabei allerdings nur einige Zentimeter. Das Experiment zeigt aber, dass es möglich ist, die Aerodynamik auch in einem komplexen System aufrechtzuerhalten.



(olb)