

TROT open-source robot allows understanding of quadruped evolution
With the TROT robot, researchers can compare evolutionary changes in quadrupeds. The robot is open source and can be replicated.
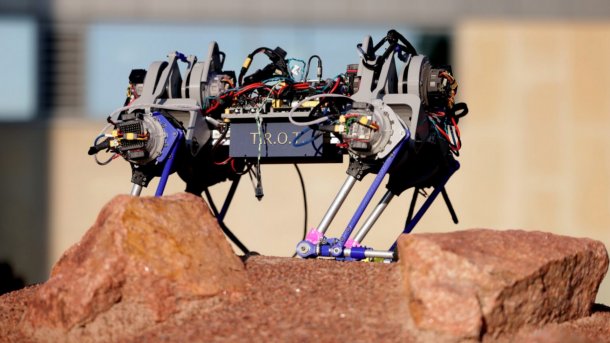
(Image: Brenda Ahearn / University of Michigan Engineering)
A team of scientists from the University of Michigan has developed the robot “The Robot of Theseus,” or TROT for short, which is suitable for simulating quadrupedal animals to better understand their evolution. The robot is open source, and the material costs are less than 4000 US dollars.
“In paleontology, we can examine bones, but it's very difficult to understand how changes in limb proportions or range of motion have affected an animal's locomotion. Robots that precisely replicate extinct animals have provided valuable insights into this,” says Talia Moore, a robotics professor with a background in evolutionary biology. “However, developing and building each individual robot took years.”
With the TROT robot, that changes. It is intended to simulate 60 million years of evolutionary changes in a body in just 20 minutes, as the researchers demonstrate in the study “The Robot Of Theseus: a modular robotic testbed for legged locomotion,” which was published in Bioinspiration & Biomimetics.
Videos by heise
Testing Evolutionary Changes
The robot is quite simply constructed for this purpose. Since it has four legs, it can only be used to understand the evolutionary development of quadrupedal animals. However, TROT is designed to be highly adaptable. Almost every body segment can be changed. Structural segments can be added or removed. The components for this come from a 3D printer. This allows most mammals to be modeled and thus variations in their structure that have occurred over the years to be compared. This makes it possible, for example, to compare extinct species with their related, currently living species. Furthermore, it is possible to test theoretical body variations to evaluate their biomechanical advantages and disadvantages, for example.
The robot can also mimic the elasticity and strength of muscles. The researchers achieve this through backward-running motors that recover energy. Springs or rubber-like mechanics are not needed for this.
TROT is exclusively designed for use in research and education, the researchers emphasize. Accordingly, the individual parts are not as durable as those of robots for operational use. However, the individual parts are intended to be easily replaceable so that the robot can be quickly repaired. The costs of the robot are quite low. They amount to 4000 US dollars. The plans for the open-source robot are available for download.



(olb)