

Mars rover: Researchers develop wheels modeled after a Sahara lizard
The wheels of a new rover wobble and don't look very elegant. But they enable stable locomotion in sand. The model was a desert lizard.
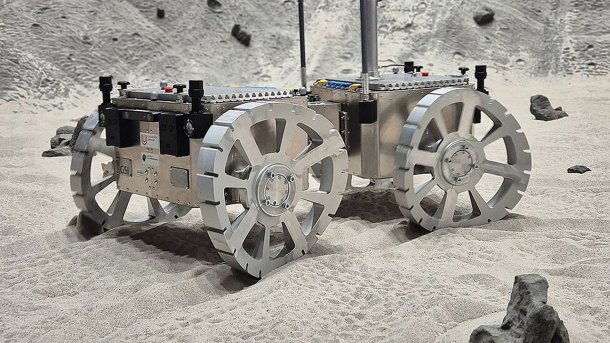
(Image: Marco Schmidt / Universität Würzburg)
Over millions of years of evolution, nature has devised solutions for many problems that scientists like to copy. A team from Würzburg and Bremen has been inspired by a lizard for the wheels of a Mars rover.
The sandfish is a lizard found in the Sahara. It has developed a special locomotion technique for moving in sand: it swims through the sand when it wants to escape predators or is hunting itself.
This movement principle, which was only deciphered a few years ago, has been replicated by the team led by Marco Schmidt, head of the Professorship for Embedded Systems and Sensors for Earth Observation (ESSEO) at the University of Würzburg. They have developed wheels for a Mars rover based on it. The rover is not supposed to drive through loose sand, which it has to cover long distances, but rather swim through it, similar to the sandfish.
Wobbly Wheels
It looks strange: the wheels wobble, comparable to a bicycle rim with a “buckle.” However, they enable stable locomotion on loose ground. “The wheels imitate the animal's characteristic interaction with the ground, generating both longitudinal and lateral forces,” said project leader Schmidt. “The rover leaves sinusoidal tracks in the sand – this confirms that the intended swimming mechanism has been achieved.”
A rover on the neighboring planet must cope with uneven terrain. Conventional wheels have difficulties with this and are heavily stressed. “Conventional wheel designs are often optimized for low-speed driving and tend to slip, sink, or get stuck on soft ground,” says Amenosis Lopez from the ESSEO team.
Improvements After Tests
The team around Schmidt tested the rover together with the robotics experts from the German Research Center for Artificial Intelligence (DFKI) in Bremen and the University of Bremen. It was tested on sand and in the field. This revealed further possibilities for improvement, said Schmidt. The first sandfish wheels were heavier and narrower than pneumatic comparison wheels. This increased the pressure on the ground. The wheels sank, causing slip, which resulted in the rover being more difficult to control.
This could be remedied by making the wheels wider and lighter. “Further refinements of the wheel surface should further improve performance on mixed terrain,” say the researchers. In addition to the hardware, they are also developing software that explicitly considers slipping, sinking, and the interaction between terrain and wheel, thus enabling more stable and adaptable rover behavior.
Videos by heise
The project is part of the Valles Marineris Explorer (Vamex) initiative of the German Aerospace Center (DLR). Its goal is to develop a swarm of rovers, crawlers, and drones to explore Valles Marineris on Mars.



(wpl)