

Fingerübung: Serviceroboter auf den Expert Days
Die zweitägige Konferenz gab einen Überblick über den Stand der Servicerobotik sowohl hinsichtlich der Technologie als auch ihrer kommerziellen Perspektiven. Erstmals präsentierte Schunk seine Fünf-Finger-Hand.
Zum fünften Mal haben in der Firmenzentrale der Schunk GmbH in Brackenheim-Hausen die "International Expert Days" stattgefunden. Unter dem Titel "Service Robotics – Quo Vadis?" versuchte die zweitägige Konferenz einen Überblick über den Stand der Servicerobotik zu geben, sowohl hinsichtlich der Technologie als auch ihrer kommerziellen Perspektiven.
Der Markt stecke natürlich „noch in den Kinderschuhen“, sagte Roko Tschakarow, Geschäftsführer für den Bereich Mobile Greifsysteme im Unternehmen, im Pressegespräch. Für die Jahre 2011 bis 2014 würden weltweit 87.500 neue Serviceroboter für den professionellen Einsatz erwartet, davon allein 25.500 Melkroboter und 22.600 Roboter im Bereich Verteidigung. Die 14,4 Millionen Roboter im privaten Umfeld teilten sich auf in 9,8 Millionen autonome Staubsauger und 4,6 Unterhaltungsroboter.

Bis Roboter auch andere Aufgaben im Haushalt oder kleineren Werkstätten übernehmen können, müssen noch einige technologische Hürden überwunden werden. Martin Hägele vom Fraunhofer-Institut für Produktionstechnik und Automatisierung (IPA) nannte bei der Eröffnung der Konferenz die Bereiche Wahrnehmung, zuverlässige Navigation, Greifen und Mensch-Roboter-Interaktion. Es gebe aber immerhin schon eine solide Basis von Komponenten, auch die Sicherheit sei im Rahmen der ISO-Zertifizierung auf einem guten Weg. Anschaffungsentscheidungen würden aber ganz klar von Wirtschaftlichkeitserwägungen dominiert, die durch qualitative Faktoren wie bessere Funktionalität nicht ausgeglichen werden könnten.
Die folgenden Vorträge bestätigten im Wesentlichen diese Einschätzung. Serviceroboter sind in Sicht, aber noch nicht zum Einsatz bereit. Zahlreiche Referenten präsentierten kleine Videofilme, in denen Roboter erstaunliche Aufgaben bewältigten. Makoto Kaneko von der Osaka University etwa zeigte Aufnahmen eines Robotergreifers, der anscheinend selbständig die geeigneten Griffe für verschiedene Objekte fand. Barry Goeree (Philips Consumer Lifestyle) präsentierte im Video, wie ein Roboterarm die Suppe in einem Topf auf dem Herd umrührte und wie ein Staubsauger, der den Strom aus der Steckdose bezieht, mit einer beweglichen Saugdüse die Wohnung reinigen könnte. Das erinnerte ein wenig an ein Mutterschiff, das sein Beiboot durch die Klippen dirigiert, war aber vorerst nicht viel mehr als eine interessante Designstudie. Der Staubsauger würde, wenn er denn überhaupt zum Verkauf bereitstände, derzeit mehrere tausend Euro kosten, sagte Goeree. Bilder davon will Philips noch nicht freigeben.
Etwas bodenständiger waren dagegen Aufnahmen wie die von Wolfgang Ertel von der Hochschule für angewandte Wissenschaft in Ravensburg-Weingarten. Er zeigte, wie ein Roboter vom Menschen lernen kann, indem dieser der Maschine Bewegungen vormacht. In diesem Fall führte ein Mensch einen Roboterarm zu einer Kaffeetasse und zur Kaffeemaschine, um dem Roboter die Zubereitung von Kaffee beizubringen. Um veränderliche Aufgaben in unstrukturierten Umgebungen bewältigen zu können, könnten Roboter nicht programmiert werden, so Ertel, sondern müssten das jeweilige Verhalten lernen, sowohl durch Demonstration als auch durch Verstärkung erfolgreichen Verhaltens. Als er vor fünf Jahren an Maschinenbauer herangetreten sei, um sie für maschinelles Lernen zu interessieren, sei er noch ignoriert worden, berichtete Ertel. Das habe sich inzwischen geändert: "Jetzt ist die Zeit, Maschinenbau und maschinelles Lernen zusammenzubringen."
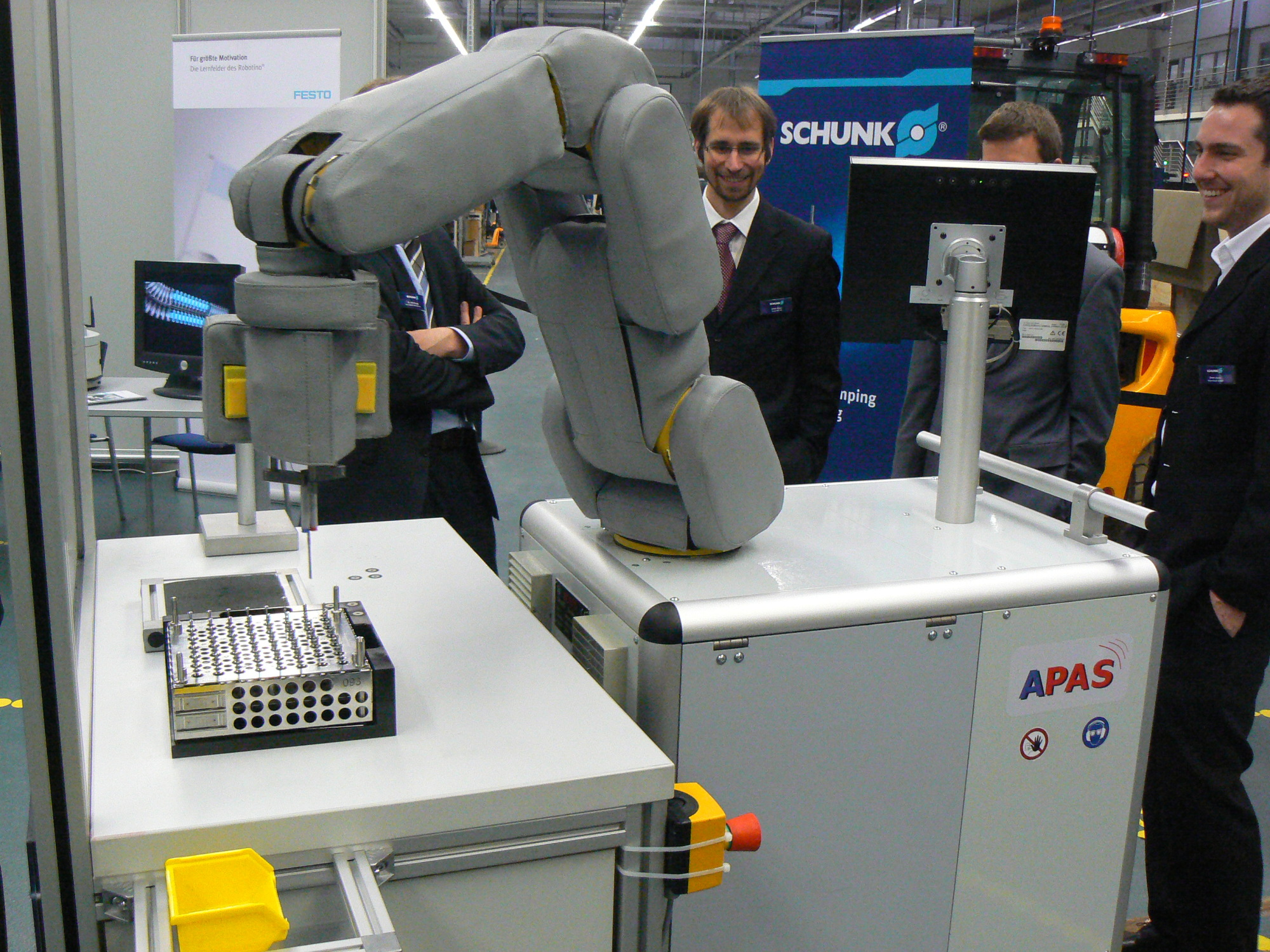
Sofern die Maschinen nicht lernfähig sind, sollen sie zumindest einfach zu bedienen und schnell zu programmieren sein -- wie der "Automated Produktion Assistant" (APAS), der bei beim Automobilzulieferer Bosch entwickelt wurde und sich gerade in der abschließenden Testphase befindet. Er könne rasch dorthin gerollt werden, wo er gerade benötigt wird, erklärte Sebastian Fritz, und komme, anders als gängige Industrieroboter, ohne Sicherheitszaun aus. Kapazitative Sensoren im Roboterarm erkennen die Annäherung eines Menschen noch vor der Berührung und stoppen die Bewegung rechtzeitig. Der Roboter könne Gegenstände greifen und an anderer Stelle ablegen ("pick and place") und brauche für einen solchen Greifzyklus sechs bis acht Sekunden.
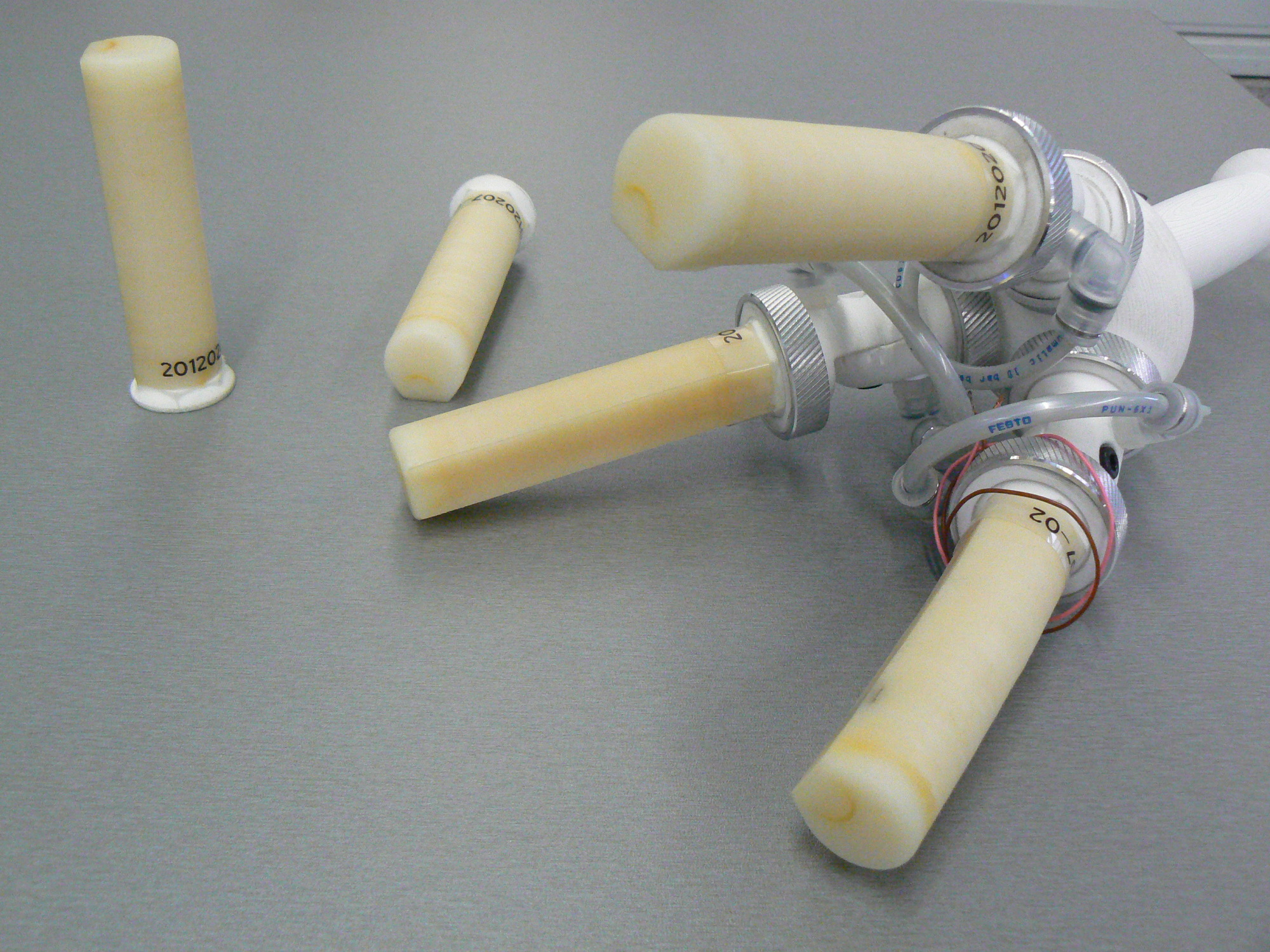
Ums Greifen ging es auch im Vortrag von Claus Risager vom Technological Institute Denmark in Odense. Er stellte einen Drei-Finger-Greifer aus flexiblem Material vor, der mit einem Preis von 7000 bis 10.000 Euro deutlich günstiger als die traditionell aus Metall gefertigten Konkurrenzmodelle ist. Der Greifer wird mikrohydraulisch gesteuert, die einzelnen Finger können entsprechend den Kundenwünschen gestaltet und mit bis zu drei Gelenken ausgestattet werden. Mehr als 100.000 Griffe sollen möglich sein, bevor ein Austausch notwendig wird. Fünf neue Finger gebe es dann für etwa 1200 Euro.
Ein derartiges Preisniveau überzeugt Forscher, die ansonsten ein Vielfaches für Roboterhände bezahlen müssen. Überzeugend ist aber auch eine andere Idee, die Risager nur kurz skizzieren konnte: Eine intelligente Mülltonne soll den Abfall nicht nur zusammenpressen, um mehr Platz zu schaffen. Sie soll zukünftig auch selbst aktiv nach Müll suchen und immer, wenn etwas in sie hineingeworfen wird, ein Geräusch von sich geben. Derzeit klingt es so, als würde jemand in einen Apfel beißen, aber natürlich sind auch andere Geräusche denkbar. Müllsammeln als Unterhaltungsprogramm – ja, so könnten Serviceroboter auf eine Weise den Alltag erobern, die kein Science-Fiction-Autor vorhergesehen hat. (dab)
