

RoboCup-WM: Was gibt‘s Neues?
Beim RoboCup werden die verschiedenen Wettbewerbe durch neue Regeln jedes Jahr gezielt schwieriger. So sollen etwa die fußballspielenden Roboter darauf vorbereitet werden, bis 2050 die Fußballweltmeisterschaft zu gewinnen.
(Bild: Hans-Arthur Marsiske)
Ein wichtiges Prinzip des RoboCup besteht darin, es den Teilnehmern des Roboterwettbewerbs von Jahr zu Jahr schwerer zu machen. So gibt es auch bei der diesjährigen RoboCup-Weltmeisterschaft in Eindhoven Veränderungen der Spielregeln, die je nach Liga unterschiedlich stark ausfallen.
Bei den humanoiden Robotern ist insbesondere deren Lokalisierung auf dem Spielfeld schwieriger geworden, weil die Tore nicht mehr durch verschiedene Farben zu unterscheiden sind. Die Spieler müssen sich daher stärker an Formen sowie an Mustern außerhalb des Spielfelds orientieren. Auch die Kommunikation ist wichtig, indem etwa der Torwart die übrigen Spieler warnen kann, wenn sie in die falsche Richtung spielen.

(Bild: Hans-Arthur Marsiske)
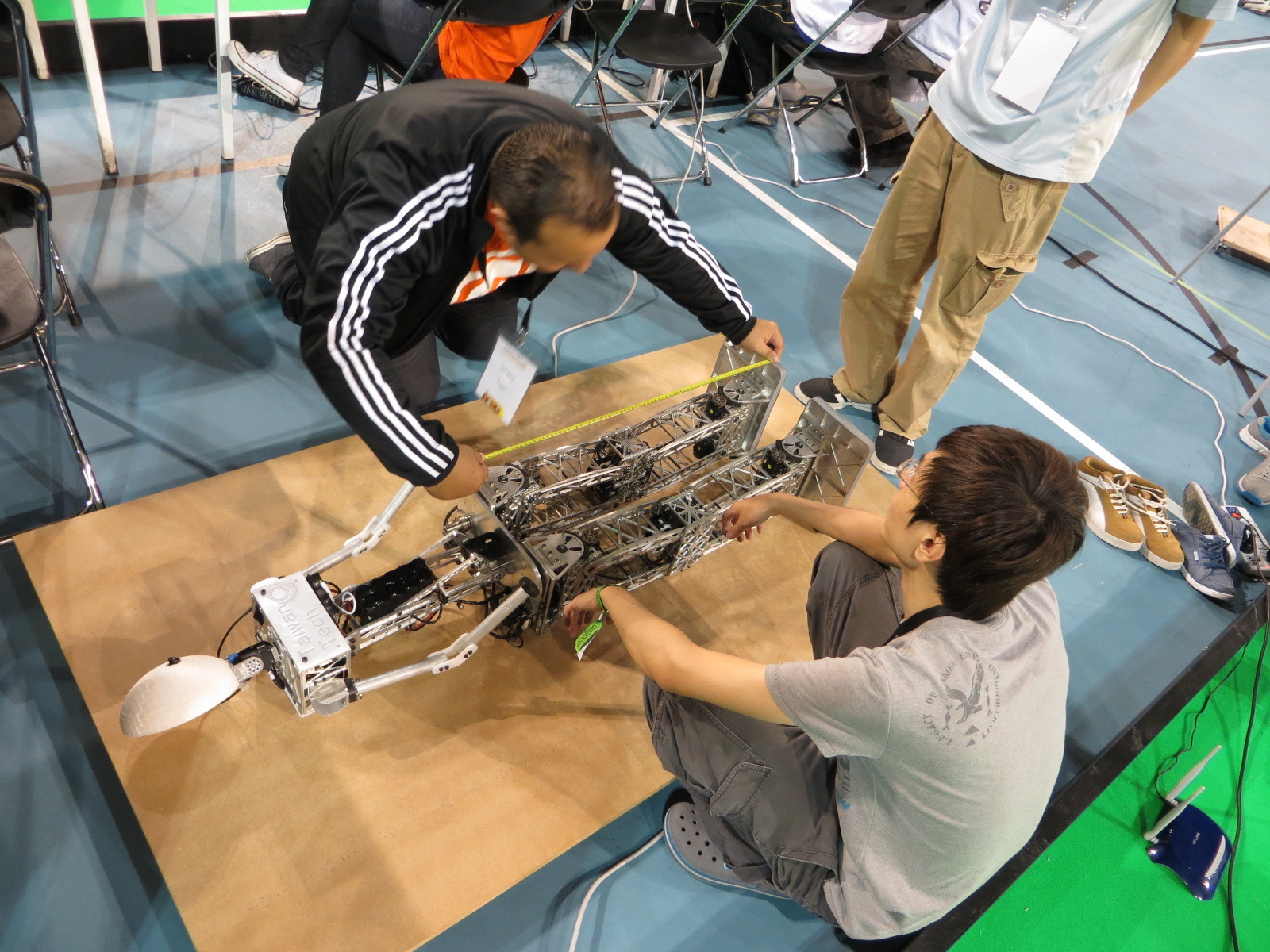
In der Kid-Size-Klasse (30 bis 60 Zentimeter) nutzen mittlerweile viele Teams den Roboter Darwin, es gehen aber auch weiterhin Teams mit Eigenkonstruktionen auf den Platz. Einige Teams versuchen, mit gefederten Beinen ein dynamischeres Gehen zu entwickeln. Um das Ziel des RoboCup zu erreichen, bis zum Jahr 2050 mit humanoiden Robotern die Fußballweltmeisterschaft zu gewinnen, müssen Roboter schließlich auch rennen und springen können. Robuste Lösungen für dieses Problem dürften aber noch einige Jahre auf sich warten lassen.
Um gegen Menschen antreten zu können, müssen die Roboter auch größer werden. In der Humanoid League des RoboCup gibt es daher neben der Kid Size auch die Teen Size (60 bis 120 Zentimeter) und die Adult Size (über 130 Zentimeter). Für die Teen Size haben sich in diesem Jahr fünf Teams angemeldet, was auf einen dynamischeren Wettbewerb als in den vergangenen Jahren hoffen lässt. Bei der Adult Size wird es voraussichtlich auch diesmal eher wenig Bewegung geben, mit der Körpergröße wachsen auch die Probleme der Steuerung und Kontrolle.
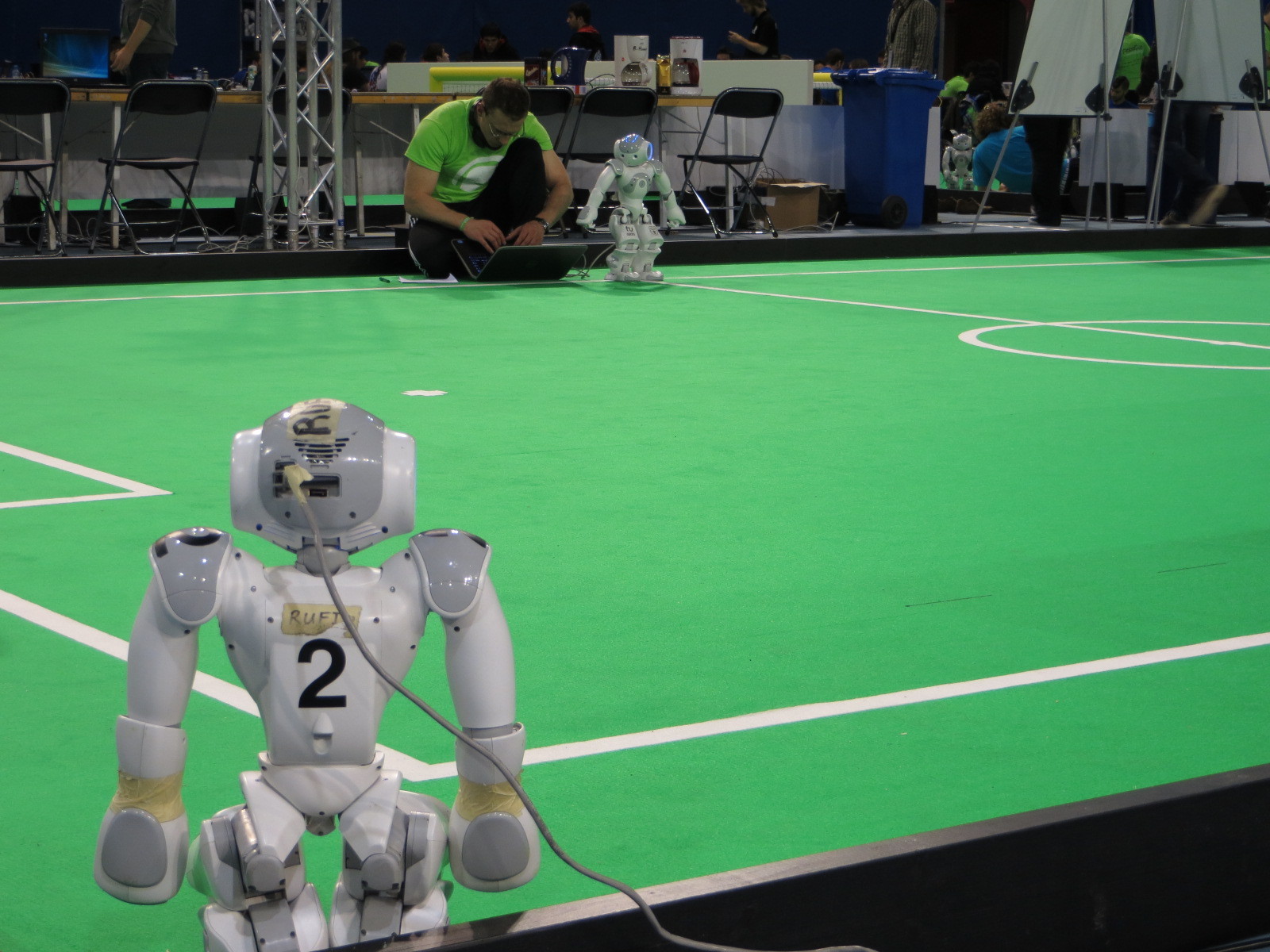
Die zweibeinigen Nao-Roboter, mit denen in der Standard Platform League gespielt wird, mussten schon im vergangenen Jahr mit gleichfarbigen Toren klarkommen. In diesem Jahr kommt eine Verdoppelung der Spielfläche hinzu. Der erweiterte Platz ermöglicht neue Spielzüge: Insbesondere gezielte Pässe, die bislang eher ein Risiko darstellten, können jetzt Vorteile bringen. In den kommenden Tagen wird sich zeigen, ob sich ohne Pass-Spiel überhaupt noch der Weltmeistertitel erreichen lässt.

(Bild: Hans-Arthur Marsiske)
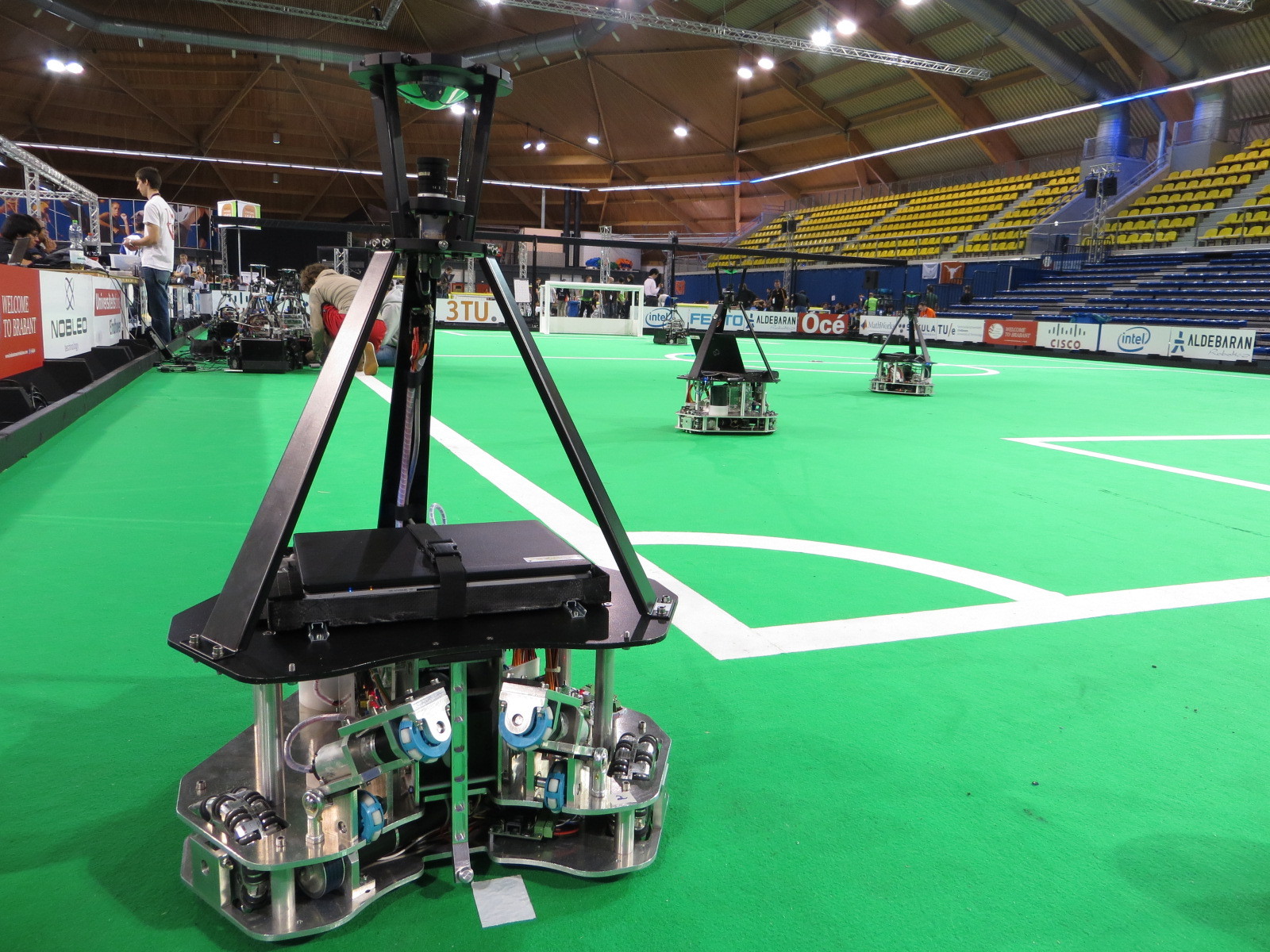
Pässe sind im vorigen Jahr auch in der Middle Size League der rollenden Roboter durch eine neue Regel erzwungen worden, die das Dribbling über die Mittellinie verbietet. Das Weltmeisterteam Tech United konnte nicht nur die Schussstärke gut auf die Entfernung zum Mitspieler abstimmen, sondern zeigte auch bei der Ballannahme gut Qualitäten. Für dieses Turnier wurden die Roboter weiter verbessert, unter anderem mit einer Kinect-Kamera, die die dreidimensionale Wahrnehmung verbessern soll. Fürs Fußballspiel musste die für Spielkonsolen entwickelte Kamera allerdings modifiziert und eingekapselt werden, um Kollisionen mit dem Ball auszuhalten.
Vergleichsweise wenig Regeländerungen gibt es in der Small Size League, deren Roboter sich an den Bildern einer über dem Spielfeld installierten Kamera orientieren. Die Bilder erlauben eine Lokalisierung von Ball und Spielern mit einer Genauigkeit von 0,5 bis 1 cm und werden 60-mal pro Sekunde aktualisiert, was schon seit einigen Jahren sehr schnelle und präzise Spielzüge erlaubt. Derzeit treten hier sechs gegen sechs Roboter an. Es soll aber auch Tests mit gemischten Teams von jeweils acht Spielern auf einem doppelt so großen Spielfeld geben.
(Bild: Hans-Arthur Marsiske)
Im Wettbewerb RoboCup@home für Haushaltsroboter sind größere Regelanpassungen nur alle zwei Jahre vorgesehen, in diesem Jahr gibt es daher nur geringfügige Veränderungen. Spannend wird der Wettbewerb trotzdem, da es mehrere Spitzenteams gibt, die immer für Überraschungen gut sind. So vermittelte etwa der einstige Weltmeister Erasers, der in den vergangenen beiden Jahren einige Probleme hatte, schon beim Setup den Eindruck großer Souveränität.
Für RoboCup Rescue, den Wettbewerb für Rettungsroboter werden kontinuierlich neue Aufgaben entwickelt. Die Roboter, die in einer Arena nach Überlebenden einer Katastrophe suchen müssen, sind in diesem Jahr unter anderem stellenweise mit Untergründen aus Sand, Kies oder Betonziegeln konfrontiert. In einer als "Ameisenfarm" bezeichneten Installation geht es darum, Löcher im Boden zu finden, die es dem Roboter erlauben, sich auf die nächst tiefere Ebene fallen zu lassen. Außerdem haben die Organisatoren dieser Liga einen Sehtest für 3-D-Sensoren entwickelt, der erstmals erprobt werden soll.

(Bild: Hans-Arthur Marsiske)
Rettungsroboter treten nicht nur real in den Wettbewerb, sondern auch in der Simulation. Hier müssen die Teams einen sehr viel größeren Bereich bewältigen, der bis zu 1×1 Kilometer umfassen kann. Sie können aber auch bis zu sieben virtuelle Roboter einsetzen, die sich mithilfe von Rädern, Ketten oder fliegend fortbewegen dürfen. Für einen als "hands-off time" bezeichneten Zeitabschnitt von 2 bis 7 Minuten sollten sie komplett autonom agieren.
Neben den virtuellen Rettungsrobotern gibt es noch die Agentensimulation, bei der es um die Koordinierung von Rettungskräften nach einem Erdbeben geht. Auf der Karte einer Stadt wird die Ausbreitung von Feuern simuliert, Kreise in verschiedenen Farben zeigen die Bewegungen von Feuerwehr, Sanitätern und Polizei. In diesem Jahr wird es in der Simulation erstmals auch Nachbeben geben, sodass sich die Umgebungskarte verändern kann. Außerdem gibt es Tankstellen, die die Ausbreitung des Feuers drastisch beeinflussen, sowie Hydranten für die Wasserversorgung der Feuerwehren.
(Bild: Hans-Arthur Marsiske)
Auch Fußball wird nach wie vor nicht nur real, sondern auch in der Simulation gespielt, sowohl zwei-, als auch dreidimensional. Während die 2-D-Simulation sich bereits sehr nah am Optimum bewegt, gibt es beim 3-D-Fußball noch viel Luft nach oben. In diesem Jahr können die Teams mit verschiedenen Spielertypen experimentieren, die sich etwa hinsichtlich der Arm- und Beinlänge oder der Schnelligkeit der Fußgelenke unterscheiden. Es geht dann darum, für die jeweiligen Spieler die optimale Position zu finden und gute Teams zusammenzustellen. Von Ablösesummen für besonders gute Spieler ist beim RoboCup zwar noch nicht die Rede, aber das ist gewiss nur eine Frage der Zeit. (mho)
