

Roboter-Symbiose: Hexakopter hilft Vierbeiner durchs Labyrinth
Wenn eine Drohne den Weg für einen Laufroboter auskundschaftet, erinnert das zwar irgendwie an die Geschichte vom Blinden und dem Lahmen, aber immerhin schafft es ein solches Duett im Experiment der ETH Zürich unfallfrei von A nach B.
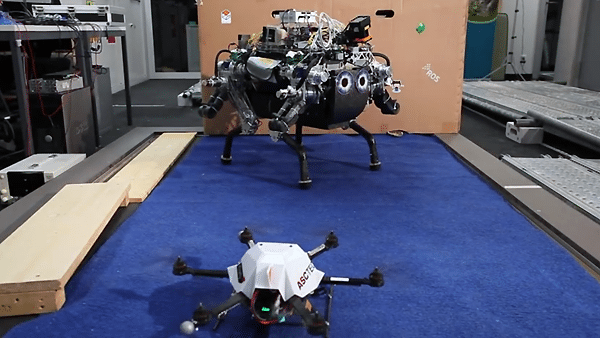
(Bild: Screenshot aus dem verlinkten Video)
In Echtzeit eine Karte ihrer Umgebung erstellen – das können inzwischen ja sogar schon Staubsaugerroboter von der Stange. Dabei hilft, wenn der verwendete Laserscanner oder sonstige 3D-Sensor möglichst hoch angebracht ist und einen guten Überblick über die Szene hat.
Eine Forschergruppe vom Autonomous System Lab der ETH Zürich hat jetzt die Funktion der Erforschung des Terrains vor der Pfadplanung und die eigentliche Bewegung durch das Gelände kurzerhand auf zwei kommunizierende Roboter eines heterogenen Teams verteilt: Der Hexakopter unter den beiden erstellt zunächst aus der Drohnenperspektive mit Hilfe der Methode SLAM (Simultaneous Localization and Mapping) eine 3D-Karte mit Höhenangaben, anschließend legt die Laufmaschine des Roboterpaares den auf dieser Basis geplanten Weg vom Start zum Ziel auf ihren vier Beinen zurück.
Wie im Video zu sehen ist, verfolgt der Laufroboter dabei nicht blindlings seinen vorgezeichneten Pfad: Er ist selbst mit Sensoren ausgerüstet, die ein 3D-Abbild seiner Umgebung erfassen und mit der Karte aus dem Überflug abgleichen. Hat sich die Umgebung inzwischen leicht verändert, bringt das den Roboter nicht aus dem Tritt, denn er orientiert sich nicht nur an den Daten seines 3D-Umgebungsscans, sondern rekonstruiert seine Position zusätzlich aus den Informationen über die Winkel und Bewegungen der Gelenke seiner Gliedmaßen.
Flugzeugträger
Während die Drohne im aktuellen Video des Autonomous System Lab ein unabhängig agierender Roboter ist, zeigt ein anderes Filmchen aus dem selben Forschungslabor den schon bekannten Vierbeiner mit einem Quadkopter an der Leine. Der hat auf dem Rücken des Laufroboters sogar eine Art Hubschrauberlandeplatz, von dem er in die Höhe steigen kann, sobald der große Überblick gefordert ist. Da es keine weitere Informationen zu dieser Konfiguration gibt, hat sich offenbar in der Forschungspraxis die Methode mit baulich getrennten Maschinen für Aufklärung und Aktion besser bewährt.
(pek)
