

ExoMars: CaSSIS – hochauflösende Kamera auf dem Weg zum Mars
CaSSIS ist eine Spezialkamera, die Stereo-Aufnahmen von der Marsoberfläche erstellen soll. Sie löst aus 100 km Höhe Strukturen in PKW-Größe auf und soll bei der Landeplatzsuche für einen Mars-Rover, vorrangig aber bei der Suche nach Spurengasen helfen.
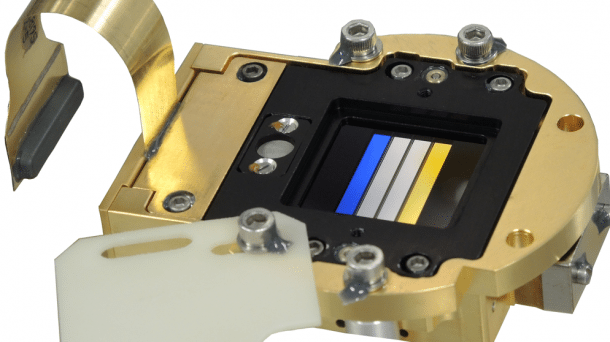
(Bild: Universität Bern)
- Dr. Christoph Jehle
Am Montagvormittag ist im kasachischen Baikonur eine Proton-M-Rakete gestartet, um die Ausrüstung für die aktuelle ExoMars-Mission von ESA und Roskosmos zum Roten Planeten zu transportieren. Mit dabei ist auch CaSSIS (Colour and Surface Imaging System) – eine hochspezialisierte Kamera, die unter Federführung der Universität Bern in der Schweiz entwickelt und gebaut wurde. Sie ist Teil des Trace Gas Orbiters (TGO) und soll bei der Suche nach Spurengasen und hier vorrangig Kohlenwasserstoffen wie Methan und Schwefelverbindungen in der Umlaufbahn helfen.
Die Suche nach Leben geht weiter
Mit CaSSIS wollen die Schweizer Wissenschaftler erkunden, ob es auf dem Mars in der Vergangenheit Formen von Leben gab oder möglicherweise sogar noch gibt. Außerdem wollen sie mit den Aufnahmen nach einem geeigneten Landeplatz für einen zukünftigen Mars-Rover Ausschau halten, wie er für die zweite ExoMars-Mission 2018 in Vorbereitung ist.
Mit dem Kamerasystem sollen Aufnahmen in einer in der Mars-Forschung bislang unerreichten Auflösung realisiert werden: "Damit lassen sich aus rund 100 Kilometern Entfernung Strukturen von der Größe eines Autos präzise abbilden – in Farbe und stereo" erklärt Prof. Dr. Nicolas Thomas vom Center for Space and Habitability und Physikalischen Institut der Universität Bern. Das Besondere: Im Gegensatz zu früheren 3D-Missionen werden die Stereo-Aufnahmen jeweils in einem einzigen Überflug angefertigt. Bislang wurden die Stereobilder aus Aufnahmen zusammengesetzt, die bei zwei aufeinander folgenden Überflügen entstanden waren. Dies ergab jedoch aufgrund des veränderten Schattenfalls oftmals nicht die erhofften Ergebnisse.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes Video (TargetVideo GmbH) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (TargetVideo GmbH) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
CaSSIS besteht aus vier Baugruppen – dem Teleskop, dem Sensormodul, dem Drehmechanismus und der Steuerungseinheit. Das Teleskop besitzt dabei vier Spiegel, die in einem Gestell aus Karbonfaser-verstärktem Polymerkunststoff befestigt sind. Der erste Spiegel hat einen Durchmesser von etwa 13,5 Zentimeter, wobei das Sensor-Detektor-System von CaSSIS auf einem Raytheon Osprey 2k hybrid CMOS-Sensor beruht, der mit 5 MPixel/s in einer 14-Bit-Auflösung ausgelesen werden kann. Der Drehmechanismus bietet die Möglichkeit, die Kamera so zu drehen, dass in einem Überflug jeweils zwei Aufnahmen erstellt werden, die dann zu dem Stereobild zusammengefügt werden können.
Prof. Thomas, der schon an früheren Kameraprojekten für die Marserkundung beteiligt war, leitete das Team, das CaSSIS innerhalb von knapp zwei Jahren entwickelt und zusammengefügt hat. Aktiviert werden soll es zum ersten Mal im April 2016. Dann soll sich zeigen, ob sich die Kamera auch im All so verhält, wie ihre Entwickler das erwarten.
Kein Modell für die Erde
Die Frage, ob die bei der CaSSIS-Kamera genutzte Technik künftig etwa für serienmäßige 3D-Kameras auf der Erde anwendbar wäre, verneint Thomas: Dies sei aus derzeitiger Sicht eher nicht zu erwarten: "Bei CaSSIS handelt es sich um ein Teleskop mit ziemlich großen Spiegeln und der bei CaSSIS eingesetzte Sensor ist für fotografische Anwendungen nicht gerade ideal."
ExoMars-Mission (9 Bilder)

(Bild: ESA–Stephane Corvaja)
(keh)
