

MIT-Projekt: Hydraulik aus dem 3D-Drucker – komplett samt Füllung
Motor und Batterie dranstecken, dann läuft der Hexapod auf eigenen Beinen aus dem 3D-Drucker – das verspricht ein Verfahren vom MIT, das flexible Aktoren samt der Hydraulikflüssigkeit im Inneren in einem Rutsch erzeugt.
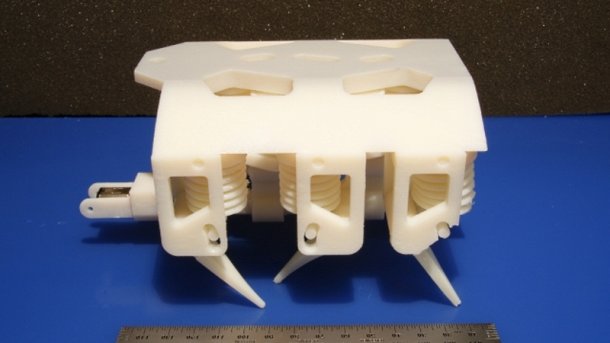
(Bild: Robert MacCurdy/MIT CSAIL)

Eine Gruppe von Forscherinnen und Forschern des Computer Science and Artificial Intelligence Laboratory (CSAIL) am MIT in Boston hat ein Verfahren entwickelt, um hydraulische Aktoren mit einem 3D-Drucker zu produzieren – komplett mit der nötigen Hydraulikflüssigkeit, bei Bedarf auch als völlig geschlossenes System. Zur Demonstration haben sie eine sechsbeinige Laufmaschine konstruiert, bei der ein Elektromotor eine längs montierte Kurbelwelle antreibt, über die wiederum sechs flexible Bälge angesteuert werden, die schließlich die keilförmigen Beine bewegen. Dabei trieb die Gruppe vor allem die Vision an, dass man so einen Roboter gebrauchsfertig in einem Arbeitsgang im 3D-Drucker fertigen kann, ohne hinterher noch irgendwelche Einzelteile montieren zu müssen. Daniela Rus, eine der beteiligten Forscherinnen, fasst es so zusammen: "Man muss nur noch den Motor und die Batterien hineinstecken und man bekommt einen Roboter, der praktisch direkt aus dem Drucker herauslaufen kann."
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes Video (TargetVideo GmbH) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (TargetVideo GmbH) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.

(Bild: Screenshot aus dem verlinkten Paper)
Für den Roboter musste der 3D-Drucker allerdings vier verschiedene Materialien verarbeiten: Je einen steifen und einen flexiblen Kunststoff, die Hydraulikflüssigkeit sowie ein Stützmaterial für Überhänge, das später entfernt wird. Allerdings mussten die Forscherinnen und Forscher dafür ihren 3D-Drucker erst mal überlisten: Der verwendete Objet260 Connex von Stratasys baut Objekte auf, indem er flüssiges Rohmaterial in winzigen Tröpfchen wie ein Tintenstrahdrucker aufträgt und dann das Material mit UV-Licht härtet, ähnlich wie bei der Stereolithographie. Das Verfahren wird auch Polyjet genannt, weil die 3D-Drucker dabei typischerweise verschiedene Materialien parallel verarbeiten und sogar mischen können.

Die Objet260 verarbeitet zwar von Haus aus auch ein Material, dass bei UV-Bestrahlung flüssig bleibt, es ist allerdings nur als Reiniger im Druckprozess vorgesehen und lässt sich nicht so gezielt platzieren wie die verschiedenen Photopolymere, aus denen die Maschine das eigentliche Werkstück aufbaut. Deshalb tauschte man am MIT kurzerhand den Identifikations-Chip an der Reiniger-Kartusche mit dem eines Gebindes eines zugelassenen Baumaterials und konnte so das Reinigungsmittel als Hydraulikflüssigkeit in die Aktoren mit eindrucken.
Roboter-Softies
Der Sechsbeiner ist nur der größte Hingucker unter den Beispielstücken, die die Forscherinnen und Forscher in ihrem neu entwickelten Verfahren produziert haben. Im Video und im Paper sind unter anderem noch eine Zahnradpumpe und ein weicher Greifer zu sehen. Solche nachgiebigen Konstruktionen haben gerade beim Roboterbau viele Vorteile: Die zu bewegenden Massen sind geringer, der Schaden bei Kollisionen mit der Umgebung vergleichsweise niedriger. Das jetzt am MIT entwickelte Produktionsverfahren könnte nicht nur helfen, Roboter-Prototypen schneller zu fertigen (der Hexapod war nach 22 Stunden fertig für den ersten Spaziergang), sondern ließe sich eventuell auch auf die Fertigung im industriellen Maßstab übertragen.
- Paper als PDF: Robert MacCurdy, Robert Katzschmann, Youbin Kim, Daniela Rus, Printable Hydraulics: A Method for Fabricating Robots by 3D Co-Printing Solids and Liquids, 2016 IEEE International Conference on Robotics and Automation (ICRA), 2016
(pek)
