Crashkurs "Elektronik für IoT-Anwendungen" (Teil 3 von 3)
Im dritten Teil des Elektronik-Crashkurses kommen häufig in IoT-Projekten eingesetzte IC-Bausteine zur Sprache. Integrated Circuits vereinigen auf minimaler Fläche eine große Menge von Logik. Müsste man diese Logik mit konventionellen Bausteinen erstellen, bräuchte man dafür Platz und Geduld.
Im dritten Teil des Elektronik-Crashkurses kommen häufig in IoT-Projekten eingesetzte IC-Bausteine zur Sprache. Integrated Circuits vereinigen auf minimaler Fläche eine große Menge von Logik. Müsste man diese Logik mit konventionellen Bausteinen erstellen, bräuchte man dafür Platz und Geduld.
Als modulare Bausteine bieten ICs komplexe Funktionalität und damit ein Rundum-sorglos-Paket für eigene Schaltungen. Hier ein paar Beispiele: Timer-Bausteine, Operationsverstärker, Motorsteuerungen, und Schieberegister. Gerade für den IoT-Entwickler sind ICs in Kombination mit Sensoren, Aktoren wichtige Hardwarekomponenten für ausgefeilte IoT-Schaltungen.
Im Folgenden lernen wir deshalb einige wichtige und verbreitete ICs kennen.
555 Timer IC
Wenn Sie raten müssten, was wohl der erfolgreichste integrierte Baustein aller Zeiten sein könnte, würden Sie dann den NE555 nennen? Wohl kaum. Den Timer IC hat der schweizstämmige Hans Camenzind im Jahre 1971 gegen Widerstände des Managements von Signetics (später Philips, noch später NXP) entwickelt. Müsste man den Baustein mit konventionellen Komponenten bauen, bräuchte man 25 Transistoren, 2 Dioden, und 15 Widerstände.
Der Winzling 555 ist ein Gigant bei den Einsatzmöglichkeiten
(Bild: wikipedia.org)
Was ist also an diesem Baustein für wenige Cent so bemerkenswert? Es ist seine unglaublich große Menge von Einsatzmöglichkeiten. Der 555 besitzt drei Operationsmodi:
Im bistabilen Modus fungiert der Baustein als Flip-Flop, kann also die Signale 0 oder 1 speichern.
Weiterlesen nach der Anzeige
555 im bistabilen Modus
(Bild: wikipedia.org)
Im monostabilen Modus lässt sich ein Signalpuls auslösen, der nach Erreichen der Zeitkonstante R x C stoppt. Der Widerstand und der Kondensator hängen an den Eingangspins 7 und 6 des 555. Durch Variieren dieser Bausteine lässt sich also die Signaldauer einstellen.
555 im monostabilen Modus
(Bild: wikipedia.org)
Im astabilen Mode sendet der Baustein regelmäßige Pulse aus, wodurch sich zum Beispiel ein Blinker realisieren lässt.
555 im stabilen Modus
(Bild: wikipedia.org)
Der Baustein ist wirklich äußerst flexibel als Timer, Pulsgenerator oder Oszillator nutzbar.
Operationsverstärker
Mit dem Thema Operationsverstärker ließen sich locker ganze Bücher füllen. Der ideale Op Amp kann Signale in V+ und V- nahezu unendlich in ein Ausgangssignal Vout verstärken, hat unendlich große Impedanz (Widerstand) an den Eingängen, null Impedanz am Ausgang, weder Offset-Spannung noch Offset-Strom, noch viele weitere bemerkenswerten Eigenschaften (siehe Wikipedia).
Symbol für Operationsverstärker
(Bild: wikipedia.org)
In der Praxis gibt es den idealen Op Amp natürlich nicht, aber die Hersteller versuchen, nah an das Ideal heranzukommen.
Müssten wir ihn selbst zusammensetzen, hätten wir einiges zu tun:
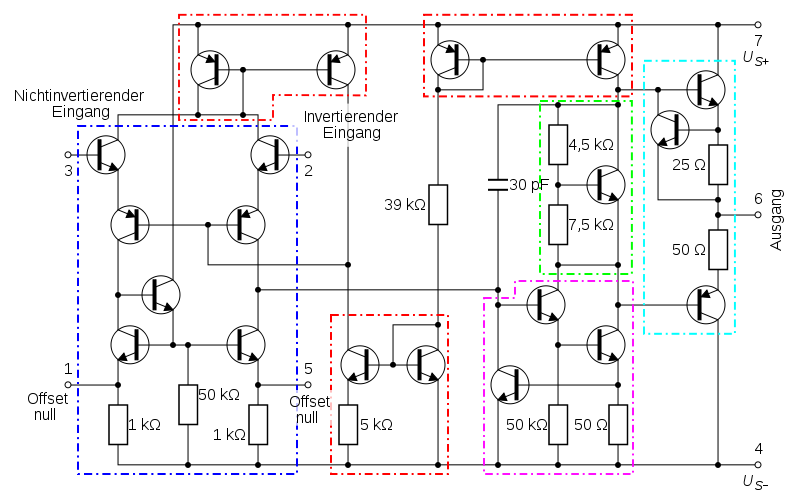
Innenleben eines Op Amps
(Bild: wikipedia.org)
Im einfachsten Fall, d.h. ohne Rückkopplung, dient er zum Vergleich der beiden Eingangsspannungen. Da er sehr hoch verstärkt, machen sich auch feinste Unterschiede am Ausgang bemerkbar.
Spannend wird es erst, wenn man das Ausgangssignal an die Eingänge zurückführt. Die Mitkopplung (das Ausgangssignal wird an den positiven Eingang zurückgekoppelt) spielt dabei eine eher kleine Rolle. Daher kommen wir zur Gegenkopplung, bei der zumindest ein Teil des Ausgangs an den negativen Eingang rückgekoppelt wird, sodass die Spannungsdifferenz zwischen V+ und V- bei 0 bleibt. Wir haben es also mit einem Regelkreis mit zu tun, bei dem die Verstärkung am Ausgang beschränkt wird.
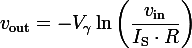
Wozu ist ein Operationsverstärker nun gut? Er erlaubt eine ganze Menge von Operationen durchzuführen. Wir haben es also mit dem Grundelement eines analogen Bausteins zu tun. Nehmen wir zum Beispiel an, wir wollten die Logarithmusfunktion elektronisch umsetzen. Dazu verwenden wir folgende Schaltung.
Verwendung eines Op Amp zur Berechnung von Logarithmen
(Bild: wikipedia.org)
Was hat das mit dem Logarithmus zu tun? Viel, denn das Ausgangssignal errechnet sich über:
Is ist die Sättigungsstromstärke
(Bild: wikipedia.org)
Mit einem Op Amp lassen sich die unterschiedlichsten Funktionen realisieren (daher das "Operation" im Namen). Hier ein kleiner Ausschnitt:
Verstärker
Integrierer
Differenzierer
Komparator,
Logarithmus und Exponentialfunktion
...
Schieberegister
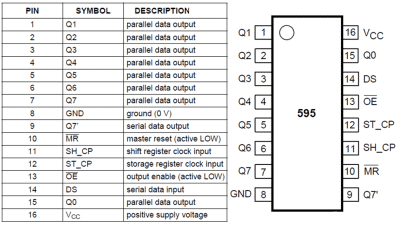
Bei Schieberegister wie den 74HC595 lassen sich Bytes speichern. Bei entsprechendem Träger-Signal legt das Schieberegister die Bits des gespeicherten Bytes auf den separaten Ausgangspins an. Klingt erst einmal wenig aufregend. Interessanter wird es, wenn wir folgende Überlegung anstellen. Um n LEDs mit einem Mikrocontroller zu steuern, benötigen wir n Ausgangspins. Wenn wir Glück haben, besitzt unser Mikrocontroller so viele Ausgänge, die sich dann aber nicht mehr für andere Zwecke nutzen lassen. Und genau hier kommt das Schieberegister zum Einsatz, mit dessen Hilfe sich mehrere LEDs steuern lassen. Das Schieberegister selbst braucht nur mit drei Ausgängen des Mikrocontrollers verbunden werden. Schieberegister lassen sich auch zum Speichern mehrerer Bytes zusammenschalten. Zudem gibt es Schieberegister mit 16 Ausgängen.
Schieberegister helfen Ausgänge einsparen
(Bild: wikipedia.org)
Half Bridges
Zum Steuern der Drehrichtung von Gleichstrommotoren dienen Half-Bridges. Ohne diese Bauelemente wäre eine umfangreiche Schaltung notwendig. Im Bild sehen wir beispielsweise einen L298, der zwei Half Bridges enthält.
Mittels Half-Bridget lässt sich die Drehrichtung eines Motors steuern
(Bild: wikipedia.org)
Der L298 enthält 2 Half-Bridges.
(Bild: wikipedia.org)
Das Verhalten lässt sich durch Eingangssignale an den Ports (S1, S2, S3, S4) der Half Bridge beeinflussen.
(1,0,0,0) bewegt den Motor nach rechts.
(0,1,1,1) bewegt den Motor nach links.
(0,0,0,0) lässt den Motor auslaufen.
(0,1,0,1) und (1,0,1,0) bremsen den Motor.
Alle anderen Kombinationen bedeuten Kurzschluss.
Normalerweise benutzen wir Half Bridges nicht direkt. In preisgünstigen Motorshields für den Arduino ist neben den Half Bridges noch eine ganze Menge von Bauteilen integriert. Damit lassen sich problemlos mehrere Motoren steuern. Für Robotikanwendungen ist das essenziell.
Optokoppler
Zum Schalten großer Stromstärken durch kleinere Elektronikschaltkreise haben wir bereits Transistoren und Relais kennen gelernt. Eine weitere Möglichkeit bieten Optokoppler bei denen die Steuerung rein optisch erfolgt. Dadurch bleiben die Schaltkreise auch räumlich getrennt.
Optokoppler schalten über Lichtsignale
(Bild: wikipedia.org)
Durch Übertragung von Photonen wird ein räumlich getrennter Schalter geschlossen.
Weitere Bausteine
Leider können wir nicht alle Bausteine besprechen. Es gibt noch eine ganze Reihe wichtiger ICs. Auf der Webseite http://arduino-info.wikispaces.com/Popular-ICs finden Sie noch weitere Beispiele und die zugehörigen Datenblätter. In kommenden Beispielprojekten kommen ohnehin noch weitere Komponenten hinzu.
Zusammenfassung
In den drei Teilen des vorbereitenden Elektronik-Crashkurses für das Internet der Dinge haben wir nun wichtige Gesetzmäßigkeiten und Komponenten elektronischer Schaltungen kennen gelernt. Das ersetzt natürlich keinen Kurs oder Buch, soll aber zumindest eine Orientierung schaffen. Mit diesem Wissen gewappnet können wir uns in den nächsten Folgen an verschiedene IoT-Projekte wagen. Es wird also ernst. Besser gesagt, der Spaß fängt hier an.
()