

Space Debris Conference: Wie fängt man einen Satelliten?
Um effektiv Weltraumschrott aus dem Orbit zu holen, werden verschiedene Techniken diskutiert. Erste stehen nun auch vor der Erprobung.
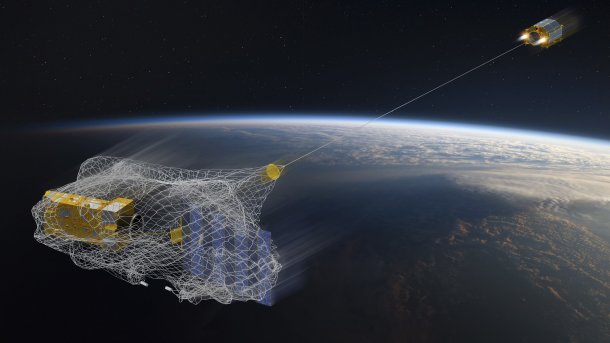
Jagd auf Weltraumschrott
(Bild: ESA–David Ducros, 2016)
Mindestens fünf größere Müllobjekte müssten jährlich aus dem Erdorbit entfernt werden, damit die Gesamtmenge des Abfalls im erdnahen Weltraum nicht weiter zunimmt. Das ist die magische Zahl, die bei der 7th Space Debris Conference in Darmstadt immer wieder zitiert wird. Bislang ist allerdings niemand in der Lage, auch nur ein einziges Teil einzusammeln und zu entsorgen.
Den Schrott einfach abbremsen
Ideen, wie im Orbit aufgeräumt werden könnte, gibt es aber viele. In niedrigen Umlaufbahnen bis etwa 1000 km Höhe läuft es zumeist darauf hinaus, die Oberstufen oder funktionslosen Satelliten abzubremsen und so gezielt zum Absturz zu bringen. Dazu müssen sie aber zunächst eingefangen werden. Die meistdiskutierten Verfahren hierfür sind Netze, Harpunen oder Roboterarme.
Ein Netz hat den Vorteil, dass dafür keine Greifpunkte für den Arm oder Einschlagzonen für die Harpune am Zielobjekt identifiziert werden müssen. Auch muss nicht erst dessen Eigenrotation ausgeglichen werden, bevor das Netz geworfen werden kann. Ingo Retat hat so ein Satellitenfangnetz bei Airbus mit entwickelt, das Ende dieses Jahres mit der RemoveDEBRIS-Mission zur Internationalen Raumstation fliegen soll. Von dort wird der Fänger-Satellit ins All ausgesetzt, wo er selbst wiederum nacheinander zwei kleine Cubesats aussetzt, um an ihnen die Fangtechniken zu erproben.
Das fünf Meter durchmessende und 300 Gramm schwere Netz, das aus der Chemiefaser Dyneema geflochten ist, wird mit 1,8 Metern pro Sekunde herausgeschleudert. Um Instabilitäten zu vermeiden, muss es zentral am Fängersatelliten angebracht sein. Sechs an den Rändern befestigte Startmassen werden mithilfe von Federn so herauskatapultiert, dass das Netz sich im Flug voll entfaltet und um das Zielobjekt wickelt. Zugleich werden in den Startmassen Uhren gestartet, die nach fünf Sekunden die darin untergebrachten Spulen zum Schließen des Netzes aktivieren. Das System sei so simpel wie möglich und redundant ausgelegt, sagte Retat: "Selbst wenn zwei Spulen ausfallen, bleibt das Objekt sicher im Netz."
Jagd mit der Harpune
Nach dem Netztest kann der Fänger-Satellit dann den zweiten Cubesat freigeben, um eine Harpune zu testen. Die wurde ebenfalls bei Airbus entwickelt und hat mehrere Vorteile, wie Alastair Wayman erläuterte: Ein Satellit könne mehrere Harpunen an Bord haben und damit auch mehrere Objekte einsammeln. Die hohe Geschwindigkeit ermögliche es zudem, sie auch auf rasch rotierende Objekte abzufeuern.
Allerdings muss zunächst ein Zielbereich von wenigstens einem Meter Durchmesser ausgewählt werden. Das 2,2 Kilogramm schwere Projektil könne eine ein Millimeter dicke Hülle durchschlagen, auch wenn es in einem Winkel bis zu 45 Grad auftrifft. Abgefeuert wird es mit einer Gaskanone, die bis zu 80 bar Druck aufbauen kann. Laborexperimente zeigten gute Übereinstimmung mit den Modellrechnungen, erklärte Wayman. Im kommenden Jahr wird sich dann zeigen, wie gut das Verfahren im All funktioniert.
Das größte Stück Müll im All
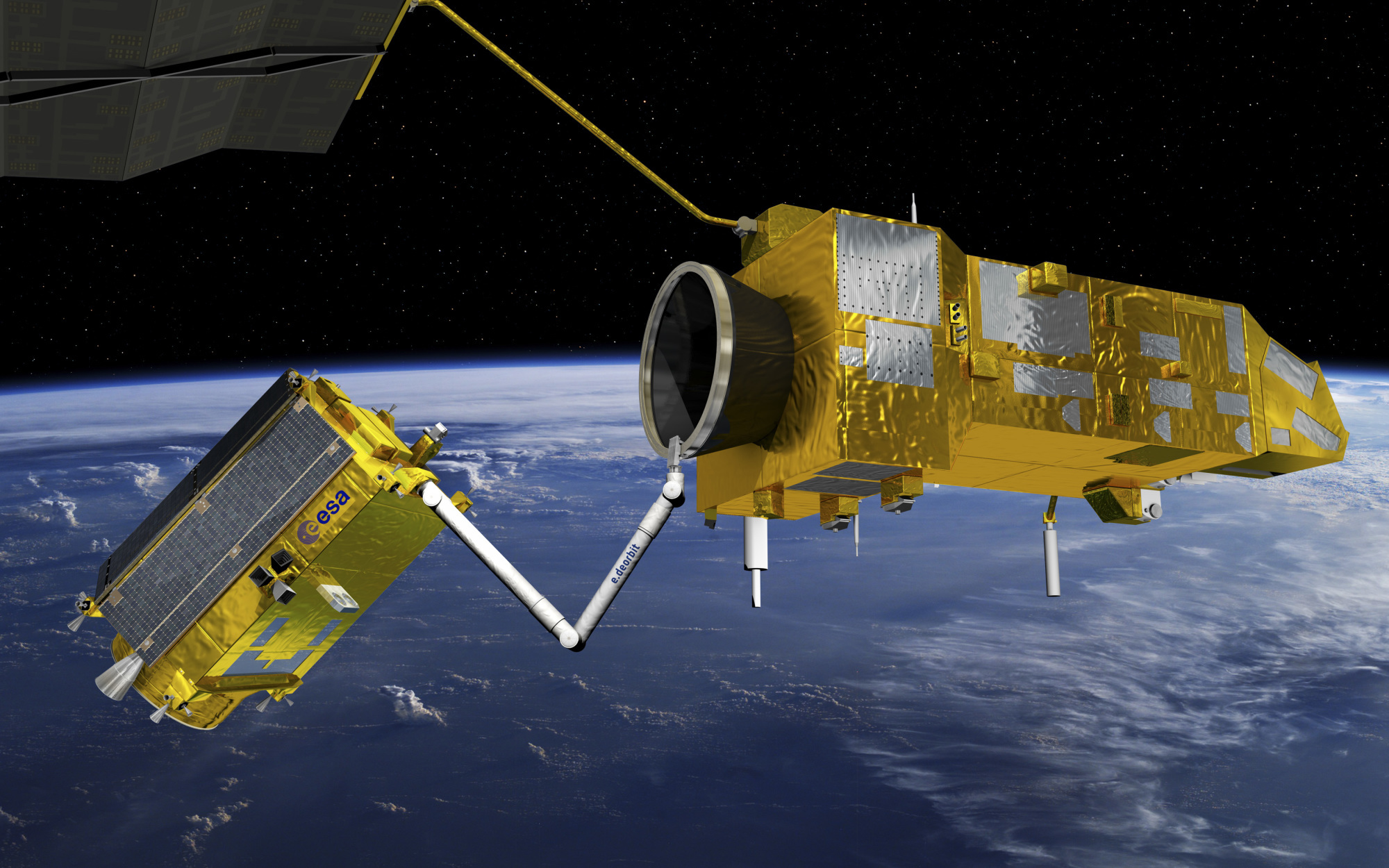
(Bild: ESA–David Ducros, 2016 )
Ein Nachteil sowohl von Netzen als auch Harpunen besteht darin, dass es schwierig ist, eine starre Verbindung zum eingefangenen Objekt herzustellen. Das erschwert die Kontrolle des Gesamtsystems, was insbesondere bei großen Objekten zum Problem werden kann. Bei der Mission e.Deorbit, die darauf abzielt, das derzeit größte Müllobjekt im erdnahen Orbit einzusammeln – den seit 2012 funktionslosen ESA-Satelliten Envisat – , setzt die ESA daher derzeit auf einen Roboterarm. Diese Technik sei auch Grundlage für die Wartung von Satelliten im Orbit, erläuterte Michelle Lavagna (Politecnico di Milano), erfordere aber zuvor die Synchronisierung der Bewegungen von Fängersatellit und Zielobjekt.
In einem Video zeigte sie, wie diese Synchronisierung mit Bodenrobotern im Labor des Deutschen Zentrums für Luft- und Raumfahrt (DLR) in Bremen experimentell erprobt wird. Nachdem das Objekt gegriffen wurde, sei eine starre Verbindung möglich, sodass die Eigenbewegungen des Gesamtsystems kontrolliert und eine Neuausrichtung vorgenommen werden könne. In der Schlussphase des kontrollierten Absturzes werde dann die größte Fläche in Flugrichtung ausgerichtet und der Satellit in Rotation versetzt, um eine höhere Stabilität zu gewährleisten.
Gefährlicher Weltraumschrott
Bleibt Envisat sich selbst überlassen, liege die Wahrscheinlichkeit, dass er bis 2020 durch eine Kollision zertrümmert wird, bei einem Prozent, sagte Robin Biesbroek von der Clean Space Initiative der ESA. Bevor der Satellit von selbst in die Atmosphäre eintritt und abstürzt, wird ein solches Ereignis mit einer Wahrscheinlichkeit von 18 Prozent eintreten. Simulationen hätten ergeben, dass bei einem unkontrollierten Wiedereintritt mindestens 25 Fragmente den Boden erreichen werden. Das Risiko, dass dabei jemand verletzt wird, liege bei 1:2000 – und damit fünfmal höher als nach internationalen Regeln gefordert.
Auch Biesbroek betonte, dass die für e.Deorbit erforderliche Technik ein Sprungbrett hin zu routinemäßigem Einsatz von Raumtransportern für Wartung und andere Serviceaufgaben im Orbit seien. Die Mission könne "die nächste inspirierende europäische Weltraummission" werden und habe in der Presse bereits viel Resonanz gefunden. Allerdings sei die Finanzierung weiterhin unsicher. Bisher habe sich kein Land gefunden, das beim Aufräumen im All die Führung übernehmen will. (mho)
