

Die alltäglichen Probleme eines Roboter-Butlers
Wäre das nicht schön: Am Abend ein Fest mit Freunden genießen und über Nacht räumt sich die Wohnung von ganz alleine auf? Beim Robocup@Home forschen Teams, damit solche Träume wahr werden.

(Bild: Simone Müller)
- Benjamin Stähle
Egal ob Tischabräumen, Staubsaugen, Abspülen oder Wäschewaschen, alles wird von dem netten Helfer aus Kunststoff und Metall erledigt. Die Teams im Robocup@Home kommen diesem Ziel jedes Jahr näher – auch wenn es bis zum fertigen iRobot noch ein gutes Stück Arbeit ist.
Meisterschaft der Maschinen:
Seit 2006 wird die @Home Liga im Robocup ausgetragen. Das Ziel: Einen Assistenten erschaffen, der in Umgebungen mit wechselnden Anforderungen selbständig intelligente Lösungen für beliebige Probleme findet – eine Aufgabe, mit der selbst Menschen zeitweise überfordert sind. Entsprechend anspruchsvoll sind die Rahmenbedingungen für den Wettkampf.
Jedes Jahr gibt es ein neues Spielfeld und veränderte Aufgaben. Die Teams erfahren erst zwei Tage vor Wettkampfbeginn die endgültigen Rahmenbedingungen für die Wettkampfarena und die Gegenstände, die in den Aufgaben eine Rolle spielen. Dadurch wird verhindert, dass die Roboter im Vorfeld zu stark an die jeweiligen Problemstellungen angepasst werden können.
Robocup@Home verfolgt damit einen anderen Ansatz als die Soccer Ligen: Dort sind zwar sowohl das Spielfeld als auch die Aufgaben genau vorgegeben, doch die sehr komplexen Spielzüge müssen dynamisch an das Verhalten des Gegners angepasst werden. In der @Home Liga entspricht das Spielfeld dagegen einer kleinen Wohnung mit mehreren Räumen und beliebigen Einrichtungsgegenständen. Die Aufgaben werden in den fortgeschrittenen Wettkampfteilen zufällig generiert und sie dürfen sogar Fehler enthalten, die der Roboter selbständig erkennen muss. Dafür sind die einzelnen Aktionen anschließend – zumindest oberflächlich betrachtet – simpel und klar definiert, etwa: “Finde eine Tüte Chips in der Küche und bringe sie zum Tisch im Esszimmer”.
RoboCup@home Vorbereitungen (5 Bilder)

(Bild: Benjamin Stähle)
Sicherheit an erster Stelle
Im Gegensatz zu den anderen Robocup-Disziplinen ist die Präsenz von Menschen innerhalb der Arena während des Wettkampfes ein fester Bestandteil: Die teilweise über 100 Kilogramm schweren Roboter müssen gefahrlos in unmittelbarer Nähe von Menschen arbeiten, mit ihnen interagieren und auch auf unvorhergesehenes Verhalten reagieren können. Damit es hier nicht zu Unfällen kommt, sind die Anforderungen an die Sicherheit der meist von den Teilnehmern selbst gebauten Maschinen besonders hoch.
Jeder Roboter muss eine Sicherheits- und Funktionsprüfung durchlaufen, bevor er überhaupt an dem Wettkampf teilnehmen darf. Ausschlusskriterien sind beispielsweise scharfe Kanten am Gehäuse, nicht fachgerechte Konstruktionen (Stichwort “Duct tape” / “Gaffa Band”) oder fehlende beziehungsweise schwer erreichbare Not-Aus-Schalter.
Weiter müssen die Roboter das Öffnen einer Tür erkennen und anschließend selbstständig an einen vorher definierten Ort navigieren. Dieser Weg wird während der Aufgabe absichtlich versperrt um zu prüfen, ob das System aktiv einem Menschen ausweichen kann, der kurzfristig seinen Weg kreuzt. Dies ist besonders wichtig, da manche Aufgaben außerhalb der Wettkampfarena durchgeführt werden müssen und der Roboter hier auch in Kontakt mit (zuweilen unaufmerksamen) Messebesuchern kommt.
Mehr Action durch Standardplattformen
Ein zentrales Problem, das allen Teams zu schaffen macht, ist die technische Zuverlässigkeit ihrer Spielgefährten. Sie führt leider hin und wieder zum vorzeitigen Abbruch einer Aufgabe, obwohl der kritische Punkt noch gar nicht erreicht ist. Für Außenstehende ist es dann manchmal frustrierend, nur einen bewegungslosen Roboter zu betrachten, während sein Team fieberhaft versucht herauszufinden, welches Stück Hard- oder Software gerade Schuld ist – aufgrund der hohen Komplexität der @Home Roboter keine einfache Aufgabe.

Die meisten Plattformen verwenden gleichzeitig mehrere PCs sowie eine Vielzahl Sensoren und Aktuatoren verschiedenster Hersteller. Das bereitet gerade Neueinsteigern Probleme, weil die Prototypen meist noch keine lange Testphase hinter sich haben. Um dem entgegenzuwirken, gibt es im Robocup Soccer eine Sub-Liga, die bewusst auf Standardplattformen mit kommerziell erhältlichen Robotern setzt, die technisch nicht verändert werden dürfen. Dies gibt den Teams mehr Raum für die Lösung der eigentlichen Aufgabe, sorgt für mehr Chancengleichheit durch identische technische Ausstattung und fördert den Austausch zwischen den Teams. Die Kehrseite der Medaille: Standardplattformen verfügen meist über deutlich weniger Rechenleistung und sind auch sensorisch schlechter ausgestattet als ihre selbstgebauten Kollegen.
Bisher war die Einführung einer solchen Sub-Liga im Robocup@Home nicht umsetzbar, da die wenigen in “Serie” produzierten Roboter viel zu teuer waren, um genug Teilnehmer für eine eigenständige Liga zusammenzubekommen. Langsam entwickelt sich in diesem Bereich aber ein wachsender Markt – seit diesem Jahr gibt es erstmals drei Sub-Ligen mit insgesamt zwei Standardplattformen.
Die bestehende Open Platform League (OPL), in der es fast keine technischen Restriktionen gibt, wird durch die Domestic Standard Platform League (DSPL) ergänzt. Hier müssen die Teams die gleichen Aufgaben mit einem Toyota Human Support Robot (HSR) lösen. Neu ist außerdem die Social Standard Platform League (SSPL) mit dem in der Öffentlichkeit deutlich bekannteren Roboter Pepper von Softbank Robotics.. Hier steht die Interaktion zwischen Mensch und Roboter im Vordergrund und weniger wie in OPL und DSPL die Erfüllung von schwierigen Manipulationsaufgaben. Auf der diesjährigen GermanOpen Meisterschaft ging nur ein Team mit einem Pepper-Roboter an den Start, der leider trotzdem den einen oder anderen Ausfall zum Besten gab. Dennoch war es ein guter Start für die neue Liga und man darf gespannt auf die Weltmeisterschaft in Japan sein.
Im Raum orientieren, Gegenstände zuordnen

(Bild: Robocup)
Für den Menschen ist es eine alltägliche Fingerübung, unbewusst innerhalb von Sekundenbruchteilen eine endlose Menge an Informationen über das eigene Umfeld zu sammeln und je nach aktuellem Bedarf zu filtern. Hierzu verfügen wir über ein hoch entwickeltes Bildverarbeitungssystem gekoppelt an eine Wissensbasis, die es uns ermöglicht, auch mit unvollständigen Informationen ein sinnvolles Ergebnis zu produzieren. Für Roboter ist so etwas eine echte Herausforderung.
Für viele Aufgaben stehen im Wettkampf nur wenige Minuten zur Verfügung – hier ist jede Sekunde kostbar. Deshalb lernen die Roboter die Wohnumgebung schon während der Setup-Phase kennen und bekommen von ihrem Team alle Orte gezeigt, die später relevant sein könnten. Die Wettkampfleitung gibt Namen und Positionen der Orte wie Bett, Küchentisch, Regal oder Esstisch vor, damit diese später in den generierten Aufgabenstellungen auch korrekt zugeordnet werden können. Der Roboter muss selbständig jeden beliebigen Punkt in der gelernten Karte anfahren und bei Bedarf auch unbekannten Hindernissen ausweichen können. Hierzu zählen auch Türen, die plötzlich geschlossen werden.
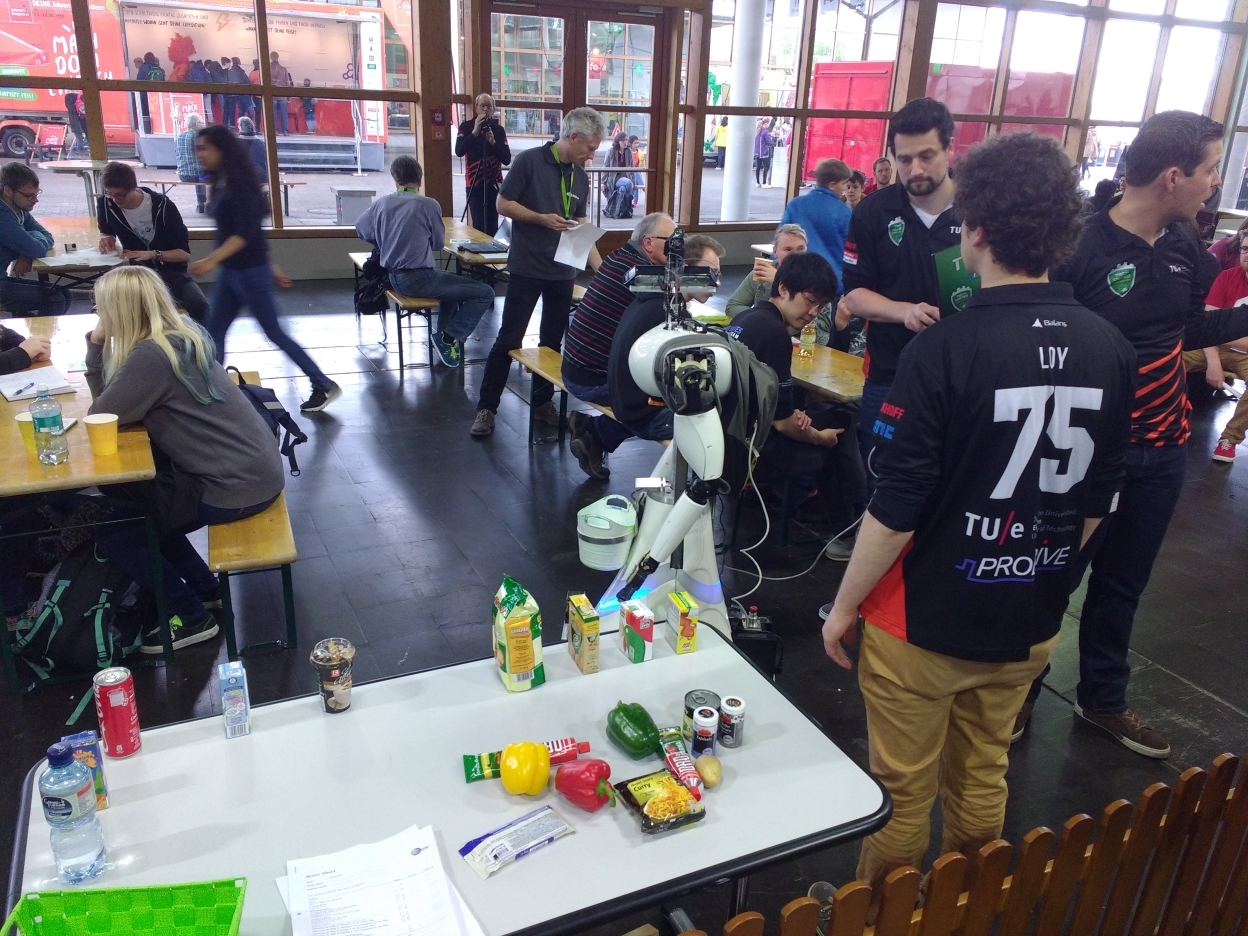
Weiter müssen über 30 Gegenstände trainiert werden, die während des Wettkampfzeitraumes zum Einsatz kommen können. Jeder Gegenstand ist einer Kategorie wie “Essen” oder “Reinigungsmittel” zugeordnet. Der Roboter muss diese Gegenstände an verschiedenen Orten wiedererkennen – egal ob sie liegen oder stehen. Außerdem muss er während der Aufgabe zusätzlich mehrere unbekannte Objekte einer der vorgegebenen Kategorien zuordnen.
RoboCup@home Aufgaben (4 Bilder)

Stimmen filtern, Menschen erkennen
Um die Befehle während der jeweiligen Aufgabe verstehen zu können, muss der Roboter über ein Sprachverarbeitungssystem zur Ein- und Ausgabe verfügen. Der Schwierigkeitsgrad erhöht sich weiter, wenn gerade viel Publikum unterwegs ist oder andere Lärmquellen in der Halle die Stimme des Operators überlagern. Damit die Aufgabe nicht wegen derartiger Störungen abgebrochen werden muss, darf der Roboter auch um das Zeigen eines QR-Codes bitten; er bekommt dann aber keine Punkte für die Interaktion.
Wurde der Auftrag korrekt verstanden, ist in den Ligen OPL und DSPL meist eine Interaktion mit einem Gegenstand involviert. Hierzu benötigt der Roboter einen oder besser zwei präzise Greifarme mit genügend Freiheitsgraden, um möglichst viele Positionen in seinem näheren Umfeld zu erreichen. Soll beispielsweise ein Gegenstand von einem Ort zu einem anderen gebracht werden, muss der Gegenstand zunächst gefunden und gegriffen werden. Hierbei darf der Roboter keinen anderen Gegenstand umwerfen – bei einer zu starken Kollision mit dem Tisch oder einem Regal wird die Aufgabe sogar abgebrochen.
Eine weitere Anforderung: Der Roboter darf nur mit einer bestimmten Person interagieren. Hierzu muss er in der Lage sein, sich ein Gesicht zu merken oder auf Gesten zu reagieren. In einer fortgeschrittenen Aufgabe muss er beispielsweise im Essbereich der Veranstaltungshalle eine winkende Person in einer Menge von Menschen erkennen, während die übrigen Besucher sich ungehindert bewegen dürfen. Außerdem muss er einer Person auch außerhalb der bekannten Arena folgen können, ohne sich von Passanten ablenken zu lassen.
(Bild: Benjamin Stähle)
Das Cloud-Dilemma
Natürlich ist die Möglichkeit sehr verlockend, einzelne Aufgaben in die Cloud zu verlagern, die auf einem lokalen System nur schwer zu lösen sind. Zumal immer mehr Firmen ihre mit enormem finanziellen Aufwand entwickelten Dienste mit einer kostenfreien Schnittstelle zur Verfügung stellen, um sich einen möglichst hohen Marktanteil zu sichern. Neben dem insbesondere in Deutschland relevanten Datenschutzaspekt verliert ein System auch einen Teil seiner Autonomie, wenn es seine Funktion von derartigen Diensten abhängig macht – kein Internet, kein Service. So geschehen im Finale der diesjährigen GermanOpen, als die Verbindung zu Amazon Alexa oder Wolfram Alpha aufgrund der schwierigen WLAN-Situation vor Ort erst nach mehreren Anläufen funktionierte.
Dennoch sind sich die meisten Teams einig: Ohne Cloud wird es in Zukunft nicht mehr gehen, da die Qualität der Services sehr wahrscheinlich lokal nicht mehr nachzuahmen ist. Trotzdem wird es für elementare Funktionen wie Sprachverarbeitung, Navigation oder Objekterkennung vorerst stets einen Ersatz geben müssen, der auch ohne Internetanbindung funktioniert.
Neueinsteiger willkommen!
Der Neueinstieg in einen etablierten Wettbewerb ist grundsätzlich keine leichte Sache. Trotzdem gibt es aufgrund des offenen Charakters der @Home Liga viele Möglichkeiten, mitzumischen ohne gleich einen Roboter für über 200.000 € kaufen zu müssen. Laut Regelwerk darf jeder autonome Roboter am Wettkampf teilnehmen, sofern er die Inspektion besteht.
In der Meisterschaft JapanOpen gibt es außerdem eine RoboCup@Home Education Liga, in der sich Teams um finanzielle Unterstützung bewerben können. Die neu eingeführten Standardplattform-Ligen tragen ebenfalls dazu bei, den Einstieg zu erleichtern. Entweder durch den günstigeren Kauf eines Pepper Roboter für aktuell 11.000€ oder eine einjährige kostenfreie Leihgabe eines Toyota HSR, sofern das Team die Voraussetzungen erfüllt und die Versandkosten übernimmt.
Hat man einen Roboter und ein motiviertes Team beisammen ist es ratsam, das umfangreiche Rulebook zu studieren um zu entscheiden, an welchen Aufgaben man teilnehmen möchte. Hier gilt ganz klar: Besser bei vielen Aufgaben ein paar Punkte einsammeln als alles auf eine Karte zu setzen.

(Bild: Simone Müller)
Für den Robocup@Home im WorldCup gibt es nur ein einzelnes Regelwerk. Die landesspezifischen Meisterschaften versuchen, sich so weit wie möglich daran zu orientieren. Das bietet den Teams eine gute Testumgebung für eine mögliche Teilnahme an der Weltmeisterschaft. Die täglichen Treffen der Teamleiter während der Meisterschaften werden außerdem dazu genutzt, Unklarheiten zu beseitigen und gegebenenfalls Verbesserungsvorschläge zu formulieren. Die Atmosphäre ist hier äußerst kollegial und die Teilnahme an so einem Event kann man, entsprechendes Interesse vorausgesetzt, nur ausdrücklich empfehlen. (uk)
