

Roboter im Notfalleinsatz: Roboter stolpern durch den Sand
Beim Wettbewerb für Notfallroboter konnten die Teams ihre Roboter testen, bevor der richtige Wettbewerb beginnt. Es zeigte sich: Der Untergrund ist für manche Roboter eine große Herausforderung. Sie rutschen oder sinken ein.
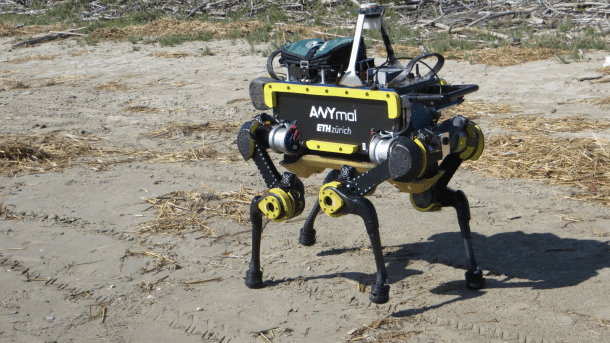
Schmale Füße sinken im lockeren Sandboden ein
(Bild: Hans-Arthur Marsiske)
Auffallend viele Plakate weisen in Piombino auf den Roboterwettbewerb ERL Emergency hin, der diese Woche auf dem Gelände eines ehemaligen Kraftwerks zehn Kilometer östlich der Stadt ausgetragen wird. Tatsächlich haben sie schon an den ersten Tagen Zuschauer angelockt, obwohl der eigentliche Wettbewerb noch gar nicht begonnen hat. Der Sonntag und Montag waren für Tests reserviert, bei denen die teilnehmenden Teams sich mit den Gegebenheiten vor Ort vertraut machen konnten.
Schlittschuhlaufen im Sand
Dabei ließ sich vor allem beobachten, dass ein Sandstrand für Roboter seine Tücken hat. Insbesondere Steigungen sind im trockenen Sand nicht leicht zu bewältigen. An der steilsten Stelle haben die Organisatoren zwar Holzplatten hingelegt, doch die machen die Aufgabe nicht unbedingt leichter. "Wenn sich auf der Platte Sand ansammelt, ist das wie Schlittschuhlaufen", sagte Björn Jensen vom Schweizer Team Bebot. "Wir werden daneben durch den Sand fahren."
Für den von Bebot verwendeten Packbot mit Kettenantrieb mag das die bessere Alternative sein. Bei Robotern, die sich auf Rädern fortbewegen, kann es dagegen passieren, dass die Räder durchdrehen und sich nach und nach in den Sand eingraben. Das passierte dem Team von der Scuola Superiore Sant‘Anna di Pisa: Eigentlich wollte der Operator den vierrädrigen Roboter über die Holzrampe steuern, traf sie aber immer nur mit einer Seite, während die Räder auf der anderen Seite den Sand aufwirbelten – obwohl zwei Teammitglieder daneben standen und ihn per Mobiltelefon dirigierten.
ERL Emergency: Roboter stolpern durch den Sand (10 Bilder)

Die Schwierigkeiten waren allerdings auch der Benutzerschnittstelle geschuldet: Der Operator konnte sich nur über ein winziges Kamerabild orientieren und kontrollierte den Roboter über die Tastatur statt mit einem Joystick. Das diene dazu, die Verzögerung bei der Übermittlung der Befehle auszugleichen und überhastete Kommandos zu vermeiden, hieß es zur Erklärung.
Repeater und Relaisstationen
Die Kommunikation ist die andere große Herausforderung. Die meisten Teams nutzen den WLAN-Standard, obwohl er bekanntermaßen störungsanfällig ist. Mehrere Repeaterstationen sind erforderlich, um im Gelände den Kontakt zwischen Roboter und Kontrollstation aufrechtzuerhalten. Während Team Bebot diese Repeater vom Roboter abwerfen lässt, nutzen andere Teams einen zweiten Roboter als mobile Relaisstation. Jurymitglied Alan Winfield (University of the West of England) ist von beiden Lösungen nicht überzeugt: "Die Teams erhöhen die Komplexität, während altmodisches Radio eine sehr viel robustere Verbindung ermöglichen würde."
Eine stabile, verlässliche Kommunikation ist nicht nur für die Steuerung der Roboter erforderlich, sondern auch für den Informationsaustausch und die Koordination zwischen den Teams in den verschiedenen Domänen Boden, Luft und Wasser. Die bei ERL Emergency gestellten Aufgaben lassen sich von keinem Roboter allein bewältigen, sondern nur in Kooperation untereinander. So können Tauchroboter feststellen, welche von vier Rohrleitungen ein Leck hat, und die entsprechende Information an den Bodenroboter übermitteln, der daraufhin im Maschinenraum das dazu gehörende Ventil schließt.
Im Innern des Gebäudes soll der Bodenroboter außerdem nach einer vermissten Person suchen und in maximal einem Meter Abstand ein Erste-Hilfe-Paket ablegen, das er zuvor von einem fliegenden Roboter bekommen hat. Die Übergabe dieses Pakets gilt als erfolgreich, wenn es maximal drei Meter entfernt vom Bodenroboter landet.
Teamwork
Da es nur wenige Forschungsinstitute gibt, die in allen drei Bereichen über die nötige Expertise verfügen, haben sich zumeist zwei oder drei Institute zusammengetan, um in diesem anspruchsvollen Wettbewerb anzutreten. Lediglich die französischen Hochschulen ENSTA ParisTech und ENSTA Bretagne treten mit ihren Teams in allen drei Domänen an.
Die ETH Zürich beteiligt sich in den Domänen Luft und Boden – und hat als einziges Team einen Laufroboter mitgebracht. Der Vierbeiner sei auf ebenem Untergrund zwar langsamer als rad- oder kettengetriebene Roboter, sagte ein Teammitglied, komme dafür aber besser mit Unebenheiten zurecht. Bevor er das demonstrieren konnte, scheiterte er jedoch am Sand: Die schmalen Füße sanken zu tief ein und brachten ihn zu Fall. Den Zuschauern war es recht, immerhin passierte etwas, während die Flugroboter nur surrend hin und wieder zurück flogen – von den Tauchrobotern ganz zu schweigen.
(kbe)
