

World Robot Summit: Deutsche schlagen sich wacker
Beim Roboterwettbewerb WRS in Tokio waren auch schwierige Parcours zu bewältigen. Teams aus Deutschland schnitten dabei ungewöhnlich gut ab.
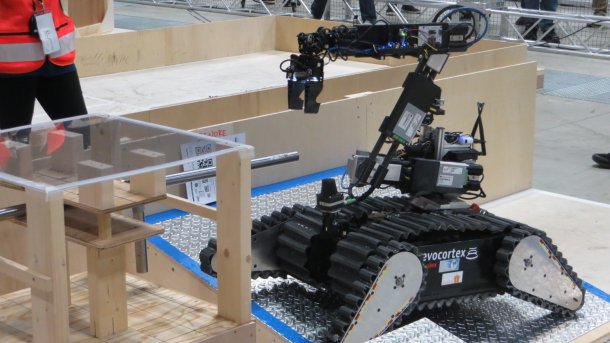
(Bild: Hans-Arthus Marsiske / heise online)
Bloß nicht Vierter werden – so lautete der Wunsch des Teams AutonOHM von der TH Nürnberg beim Roboterwettbewerb World Robot Summit in Tokio. Denn "Vierter" klingt im fränkischen Dialekt ein bisschen wie "Fürther" und dieses Verwechslungsrisiko möchten Nürnberger angesichts der Rivalität mit der Nachbarstadt gerne vermeiden. Also legte sich das Team am letzten Turniertag mächtig ins Zeug – und erreichte das Ziel.
Wendigkeit auf engem Raum
AutonOHM trat in der Standard Disaster Robotics Challenge an, wo es sich als eines von vier Teams fürs Finale qualifiziert hatte. Die Aufgabe bestand darin, in 20 Minuten möglichst viele von fünf Parcours zu bewältigen, für die es jeweils bis zu fünf Punkte gab. Der Schwierigkeitsgrad war unterschiedlich, hing auch ein wenig von der Größe und Ausstattung der Roboter ab. So hatten die kleineren Roboter der beiden japanischen Teams Nexis-R (Nakaoka University of Technology) und Shinobi (Kyoto University) dort einen Vorteil, wo es um Wendigkeit auf engem Raum ging.
Auf einem Feld etwa verstellten schräg befestigte Holzlatten den Weg zu fünf Messgeräten, deren Anzeige es abzulesen galt. Hier raste der Roboter von Shinobi geradezu hindurch, während der deutlich größere Roboter Telemax des Teams Telerob von der gleichnamigen deutschen Firma sehr viel vorsichtiger manövrieren musste. Gleichwohl war es beeindruckend zu sehen, wie auch dieser Koloss mit hochgeklappten Antriebsketten die Hindernisse überwand. Offensichtlich vermittelt der Roboter dem Operator eine sehr gute Situationswahrnehmung.
Auf zwei Feldern war die Lösung schwieriger Manipulationsaufgaben gefordert: Ein T-förmiges Metallrohr musste durch hölzerne Konstruktionen geschoben werden, die dem senkrecht herausragenden Teil des Rohrs verschiedene Hindernisse in den Weg stellte. Das Rohr musste daher gedreht oder schräg verkantet werden, um diese Aufgaben zu lösen. Hier war ein guter Greifer wichtig. Aber selbst dann war die Bewältigung dieser Aufgabe so zeitaufwendig, dass kein Team mehr als einen Versuch durchführte. Auf dem benachbarten Feld konnte mit dem Schließen von bis zu fünf Ventilen schließlich schneller gepunktet werden.
Knappes Ergebnis, Diskussion über Bewertungssystem
Das Ergebnis fiel am Ende überraschend knapp aus: Shinobi gewann mit 14 Punkten vor Telerob und AutonOHM, die jeweils 13 Punkte erzielten. Telerob kam trotz Punktegleichheit auf den zweiten Platz, weil dessen Roboter wassergeschützt ist, was ihm bei der Bewertung einen Bonus von fünf Prozent verschaffte.
Umgekehrt ließe sich auch argumentieren, dass die Leistung von AutonOHM höher gewichtet werden müsste, da das Team mit einer Forschungsplattform antrat, während es sich beim Telemax um ein ausgereiftes kommerzielles Produkt handelt.
In den anderen Wettbewerbssparten des World Robot Summit (WRS) wurde ebenfalls immer wieder darüber diskutiert, inwieweit das Bewertungssystem die dargebotenen Leistungen wirklich angemessen abbildet. Das Team Homer (Uni Koblenz) etwa, dass mit seinem mobilen Roboter in der Kategorie Servicerobotik beim Szenario "Toilettenreinigung" die vielleicht am konsequentesten in die Zukunft weisende Performance gezeigt hatte, erhielt null Punkte, weil der Roboter anschließend nicht den schwarz markierten Bereich um die Toilettenschüssel verlassen hatte – ein Problem, das sich für die von anderen Teams fest installierten und damit traditionelleren Systeme gar nicht erst stellte.
World Robot Summit 2018 – Deutsche schlagen sich wacker (18 Bilder)

Solche Unstimmigkeiten sorgten jedoch für keine schlechte Stimmung. Schließlich wissen alle Teilnehmer, dass die Leistungsbewertung von Robotern unter dem Titel "Benchmarking" ein viel diskutiertes und offenes Forschungsproblem ist, zu dessen Lösung auch die jetzt in Tokio gesammelten Erfahrungen wieder ein wenig beitragen dürften. Zudem war der Wettbewerb ansonsten erstklassig organisiert, die Hallen hervorragend ausgestattet. Auf mehreren Kanälen wurde das Geschehen, zumeist von zwei Moderatoren im Dialog (auf Japanisch) kommentiert, live im Internet übertragen – die Aufzeichnungen sind weiterhin verfügbar. Das lässt für den WRS im Jahr 2020, der dann erst in vollem Umfang stattfinden soll (dieses Jahr war "nur" ein Testlauf), viel erwarten.
Roboter aus Deutschland auf vorderen Plätzen
Bleibt noch zu erwähnen, dass Teams aus Deutschland ungewöhnlich gut abgeschnitten haben. Von fünfeinhalb teilnehmenden deutschen Teams (bei insgesamt 126) erreichten viereinhalb vordere Plätze. Neben AutonOHM und Telerob waren das Homer mit einem dritten Platz in der "Customer Interaction Challenge" der Kategorie Servicerobotik sowie Hector (TU Darmstadt), das es bei der "Plant Disaster Prevention Challenge" der Rettungsroboter sogar auf den ersten Platz schaffte.
Und das halbe deutsche Team? Das trat in der "School Robot Challenge" der Junior Kategorie (bis 19 Jahre) an, kam von der Deutschen Schule in Yokohama und wurde als deutsch-japanisches Team gelistet. Bei diesem Wettbewerb waren die Teilnehmer aufgefordert, Ideen für die Nutzung von Robotern in der Schule zu entwickeln und einen Pepper-Roboter, der ihnen dafür zur Verfügung gestellt wurde, entsprechend zu programmieren. "Wir haben uns überlegt, dass man ihn gut als Bibliothekar einsetzen könnte, der Leseempfehlungen gibt und die Besucher der Bibliothek auch zu den Büchern führen kann", erklärte Mario Baust, der das Team DSTY leitet. Dass sie damit auf Anhieb auf den dritten Platz kommen würden, hat ihn dann aber doch überrascht.
Lesen Sie dazu außerdem auf heise online:
- World Robot Summit: Wettbewerb kommt schleppend in Gang
- World Robot Summit: Wettkampf der Industrieroboter – Klassik gegen Moderne
(tiw)
