

Universeller Schubvektorantrieb für Modellfahrzeuge
Der Aufsteckantrieb bringt beliebige Autos, Boote und andere Modellvehikel in Fahrt – mit geschickter Ablenkung des Luftstroms werden sie einfach ferngesteuert.
- Roman Radtke
Sie sind universell einsetzbar und mechanisch einfach zu bauen – indirekte Antriebe, die geschickt die sie umgebende Luft ausnutzen. Während der direkte Radantrieb eines Autos nur mit festem Boden unter den Reifen funktioniert, ermöglicht ein aufgesetzter Propeller die Fortbewegung zu Lande, zu Wasser und in der Luft. Eine mit wenigen Handgriffen montierbare Antriebs- und Lenkeinheit, die aus den unterschiedlichsten Vehikeln und Spielzeugen ferngelenkte Fahrzeuge und Flugobjekte macht, ist außerdem schnell selbst gebaut.
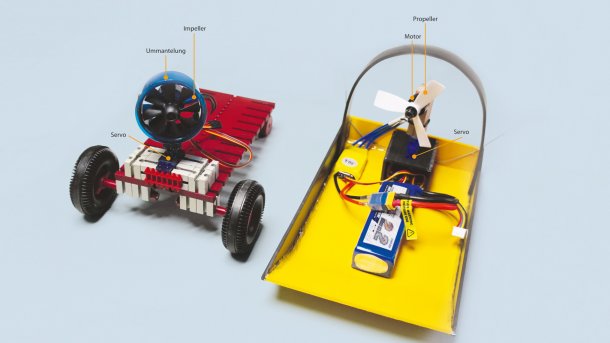
Einen solchen Universalantrieb für Modellfahrzeuge und -flugzeuge haben wir exemplarisch auf zwei Arten realisiert: einmal in der eher klassischen Propeller-Version und einmal in der futuristischen Variante mit einem Impeller, die einem Düsentriebwerk ähnelt. Das Prinzip ist in beiden Fällen dasselbe. Ein Servo unter dem Motor steuert den Luftstrom in die gewünschte Richtung. Damit ist die Lenkung auch gleich eingebaut. Das Ganze wird Schubvektorsteuerung (englisch: thrust vector control, TVC) genannt.


- Universeller Aufsetzantrieb für ferngesteuerte Modelle: Fahrzeuge, Flugzeuge, Boote
- Bauvorschläge mit und ohne 3D-Drucker
- Varianten mit Propeller oder Impeller
Checkliste
- Zeitaufwand: wenige Stunden
- Kosten: ab 25 Euro zuzüglich Material für ein Fahrzeug
- Materialbearbeitung: Sägen, Bohren, Feilen, Schrauben, Kleben und PVC schneiden
- 3D-Druck: optional, erspart einiges an Handarbeit
- Löten: wenige Komponenten verbinden, eventuell Löten sogar unnötig
- Fernsteuerung: samt passendem Empfänger, schon ab 15 Euro zu haben
- Zip-Archiv mit den 3D-Dateien
- Zum GitHub-Repository mit den 3D-Dateien
Material
Für den Antrieb
- Fahrtenregler (ESC) für Brushless-Motoren, mindestens 30A, vorzugsweise mit eingebautem 5V-Spannungsregler (BEC)
- LiPo-Akku 3S Kapazität 500–2200mAh
- Stecker für den Akku
- 9g Servo etwa HXT900-Micro-Servo, samt beiliegenden Servohörnern und Schrauben
- Kleiner Racecopter-Motor etwa Emax RS1306 RaceSpec mit 4000KV
- 3-Blatt-Luftschraube mit 3 Zoll Durchmesser
- Elektro-Impeller etwa DW Wing 45mm EDF mit 6000KV, alternativ zu Motor und Luftschraube
- Kabelbinder
- Fernsteuerung mit Empfänger, mindestens 2 Proportional-Kanäle
Für Fahrzeuge und Halterungen
- PVC-Hartschaumplatte 3mm dick
- Holz-Vierkant etwa 15mm × 15mm × 50mm
- 3D-Druck-Filament ABS, PLA oder PETG, alternativ zur Platte und dem Vierkant
- Spiel-Baukasten-System für den Fahrzeugbau, etwa Fischertechnik, Lego oder Quix; alternativ ein Spielzeugauto mit einem Radstand von etwa 20–30cm
Werkzeug
- scharfes Teppichmesser
- Heißluftpistole
- Heißklebepistole und Kleber
- Sekundenkleber
- grobes Schmirgelpapier oder Feile
- Bohrmaschine und Bohrer
- Schraubendreher
- Seitenschneider
- eventuell Lötkolben und Lötzinn
Bewährtes Prinzip
Ein Vorbild unseres Antriebs sind die Sumpfboote, die in den Everglades von Florida mit atemberaubender Geschwindigkeit und ebensolchem Lärm über das flache Wasser, sumpfigen Boden und jedwelches Gestrüpp hinwegfegen. Gesteuert werden diese Boote normalerweise mit Rudern, die direkt hinter dem Propeller angebracht sind und den Luftstrom umlenken. Anders als bei einer Radlenkung mit Bodenhaftung wird das Gefährt dabei eher um die Kurve gedrückt als gelenkt – wer mal in einem Rennboot mitgefahren ist, weiß, wie anders sich das anfühlt.
Das war die Leseprobe unseres heise-Plus-Artikels "Universeller Schubvektorantrieb für Modellfahrzeuge". Mit einem heise-Plus-Abo können Sie den ganzen Artikel lesen.