

Robuster Flugroboter mit weichen Flügeln
Forscher aus Harvard haben einen neuen Flugroboter namens "RoboBee" vorgestellt, der erstmals auch mit weichen Flügeln fliegt – und so Kollisionen übersteht.
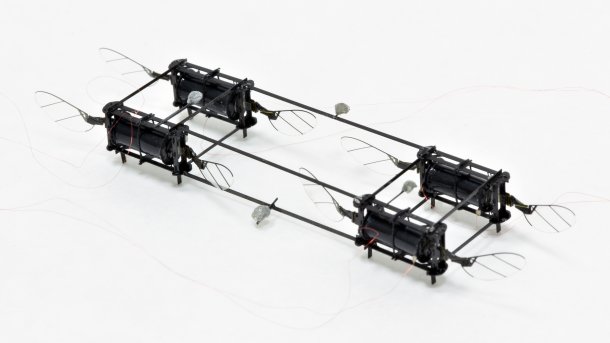
(Bild: The Harvard MicroRobotics Lab/Harvard SEAS)
Besonders elegant fliegen die Roboter nicht gerade, die Wissenschaftler der Harvard University jetzt in einem Video präsentiert haben. Sie stoßen gegen Wände, drehen sich, stürzen auf den Boden. Doch eben das ist das Besondere an ihnen: Es macht ihnen nichts aus. Danach können sie problemlos weiterfliegen.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes YouTube-Video (Google Ireland Limited) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (Google Ireland Limited) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Das Geheimnis dieser Robustheit liegt in den weichen Aktuatoren. Die Roboter heben ab mithilfe leichter, nachgiebiger Flügel, die, anders als etwa die starren Rotoren eines Multikopters, beim Aufprall nicht brechen. Bislang habe es solchen Flügeln an der nötigen Leistungsdichte und der erzielbaren Schlagfrequenz gemangelt, um sie als Antrieb für fliegende Roboter zu verwenden, schreiben Yufeng Chen und sein Forschungsteam in der aktuellen Ausgabe der Zeitschrift Nature. Mit einem Antrieb aus dielektrischen Elastomeren sei es aber nun gelungen, eine Leistungsdichte von 600 W/kg zu erzielen. Die Forscher haben damit Flügelmodule konstruiert, die lediglich 155 mg wiegen, Schlagfrequenzen bis zu 500 Hz erzielen und zu unterschiedlichen Konfigurationen miteinander kombiniert werden können. In Videoaufnahmen demonstrieren sie, wie Roboter mithilfe dieser Flügel kontrolliert über einer Stelle schweben, aber auch Kollisionen unbeschadet überstehen können.
Diese Roboter sind noch auf eine externe Energieversorgung und ein Motion Capture System angewiesen. Im Vergleich mit anderen, durch piezoelektrische Aktuatoren angetriebenen Schlagflüglern liege zudem der Energieverbrauch noch zu hoch, räumen die Autoren der Studie ein. Sie nennen aber auch einige Ideen, wie die Effizienz ihres Verfahrens zukünftig weiter gesteigert werden kann. Zunächst sei es ihnen darum gegangen, zu zeigen, "dass weich angetriebene Roboter agil, robust und kontrollierbar sein können“. Für zukünftige weiche Roboter, die unstrukturierte Umgebungen bei hohem Kollisionsrisiko erkunden sollen, seien das wichtige Charakteristika. (siko)
